0135
Accelerated Magnetic Resonance Fingerprinting using Soft-weighted key-Hole (MRF-SOHO)1Division of Imaging Sciences and Biomedical Engineering, King's College London, London, United Kingdom, 2Center for image sciences, University Medical Center Utrecht, Utrecht, Netherlands
Synopsis
Magnetic Resonance Fingerprinting estimates multi-parametric maps from a series of highly undersampled time-point images. However, MRF scan times are still long due to the large amount of time-point images (~1000) required to produce accurate multi-parametric maps. Here we propose to exploit redundant information in time-point images with similar contrast to accelerate the MRF scan by further undersampling each time-point image and/or significantly reducing the number of required images in the series. The proposed approach achieved an acceleration factor of 5.7× compared to conventional undersampled MRF while maintaining parametric map quality.
Introduction
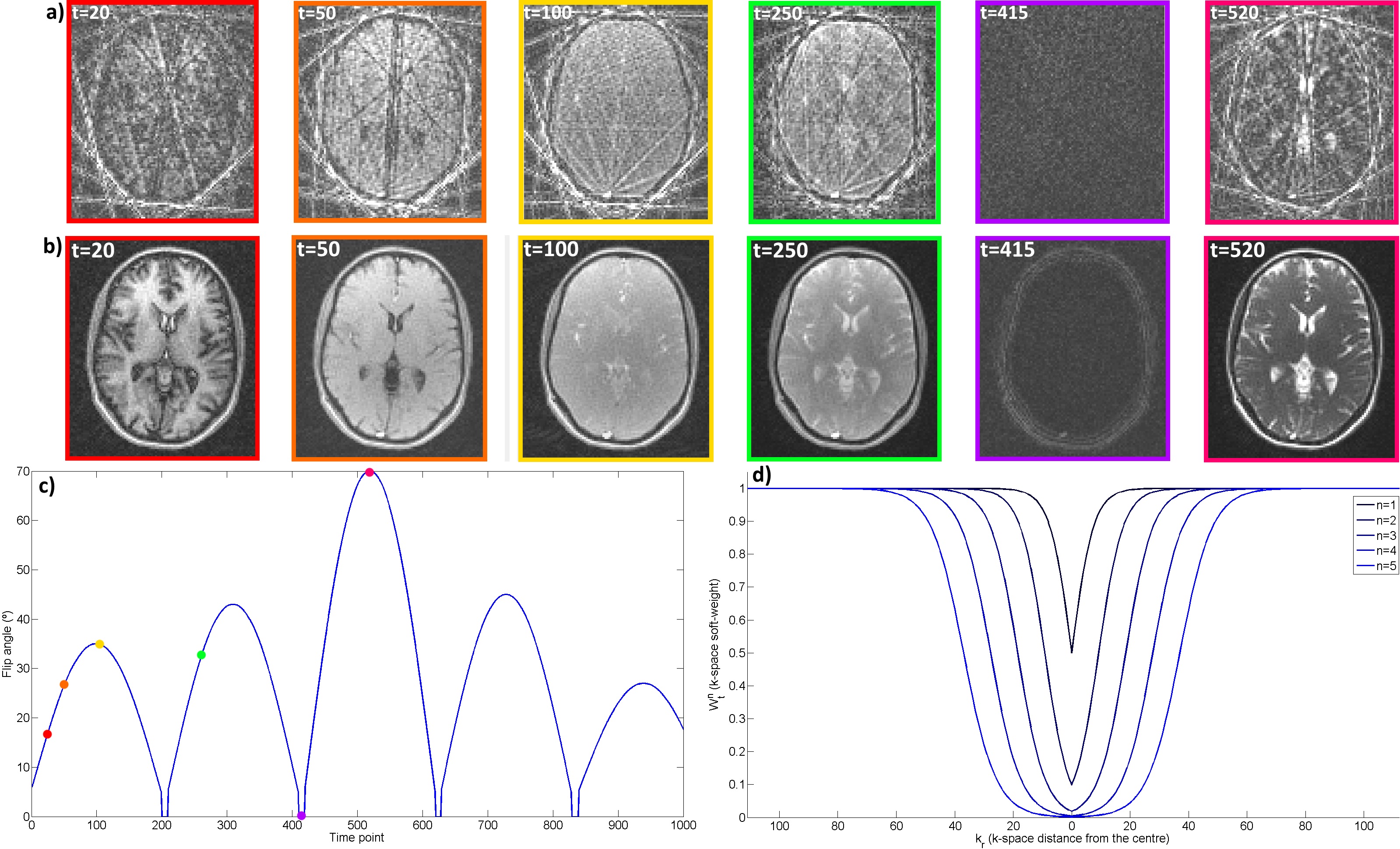
Magnetic Resonance Fingerprinting (MRF)1 relies on temporal incoherence of the signal evolution of different tissues to enable pixelwise matching of a measured signal to a dictionary of simulated signals. The parametric space is typically explored by varying the repetition time (TR) and flip angle (FA) between time-point images to generate unique signal evolutions. Traditionally used slowly varying FA produces a smooth change in contrast, resulting in redundant high frequency information in the series of time-point images. To further accelerate the MRF scan, this information is exploited using a SOft-weighted key-HOle (MRF-SOHO) reconstruction that enables data sharing of high frequency information between different time-point images. The proposed approach was validated on a standardized T1/T2 phantom and in-vivo brain acquisitions.Methods
MRF-SOHO combines parallel imaging2, soft-gating3 and key-hole4 methods to accelerate the MRF scan. In MRF-SOHO, each time-point image is reconstructed using high frequency data from its temporal neighbourhood by solving It = arg min ||Wtn(FSIt - Kt)||2. F is the Fourier transform, S are the coil sensitivities and Kt are the acquired k-space data for time-point t. The soft-weights Wtn for time-point t and neighbour n ∈ {t-Δt,...,t+Δt} are given by Wtn(kr) = 1 - {exp[(kr - α(n))/(β(n)]+1}-1 for n≠t and Wtn(kr)=1 for n=t, where kr is the distance from the k-space center, and α(n) and β(n) control the amount of shared data by neighbour n. MRF-SOHO shares high frequency information, reconstructing alias free time-point images without compromising image contrast (Figure 1). The MRF dictionary was built with an Extended Phase Graph method based on5 for T1 (ranges [0, 6000] and [0, 1600]) and T2 (ranges [0, 2600] and [0, 260]) values (for brain and phantom, respectively). Template matching was performed as described in1.Experiments
A standardized T1/T2 phantom6 was scanned in a 1.5T Philips system using an 18-channel coil. Data was obtained with a rewound gradient echo acquisition after an initial inversion pulse using a tiny golden radial (~23.6º) trajectory7. Relevant scan parameters include: resolution 2×2 mm2, 10 mm slice thickness, field-of-view 320×320 mm2, 8 radial spokes per time-point, 1000 time points and TR (varying between 6.0 and 7.4 ms) and FA (varying between 0º and 70º) patterns similar to the ones described in8. One healthy subject underwent a brain scan in the same system using a 12-channel coil and the same protocol as above, (except field-of-view=440×440 mm2). In both acquisitions, the neighborhood size n for the MRF-SOHO reconstruction was set to 17, α(n) varied linearly between 0 and NFE/6, and β(n) varied linearly between NFE/60 and NFE/40, where NFE is the number of frequency encodings. Both datasets were reconstructed with a zero fill gridding reconstruction as in conventional MRF1 and the proposed MRF-SOHO using 8, 4 and 2 radial spokes (corresponding to angular undersampling factors of ~31×, ~63×, ~126× and ~43×, ~86×, ~173× for the phantom and brain datasets, respectively). Template matching of these reconstructions was performed using different number of time-point images, from 50 to 1000 (as in1) time points.Results
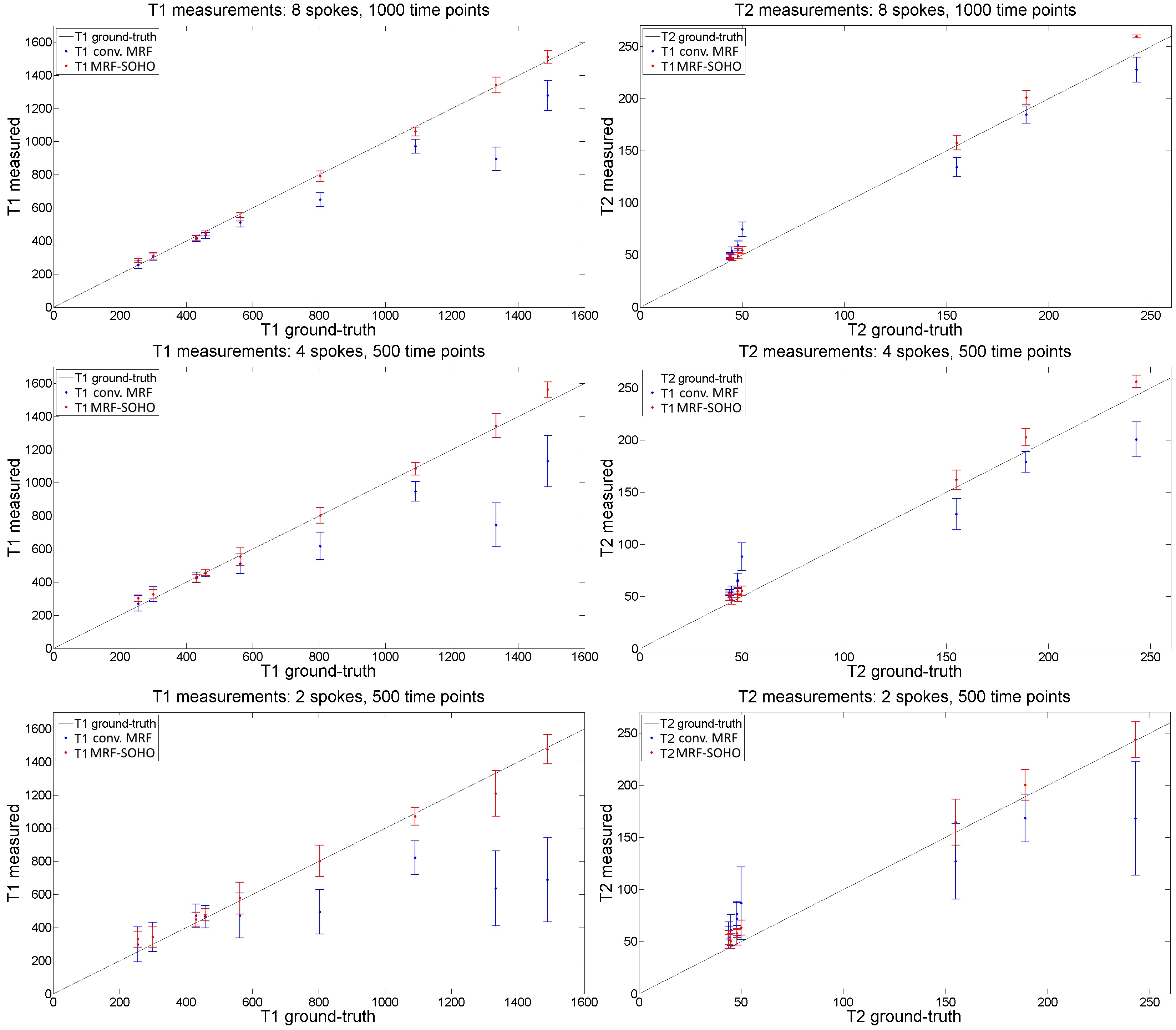
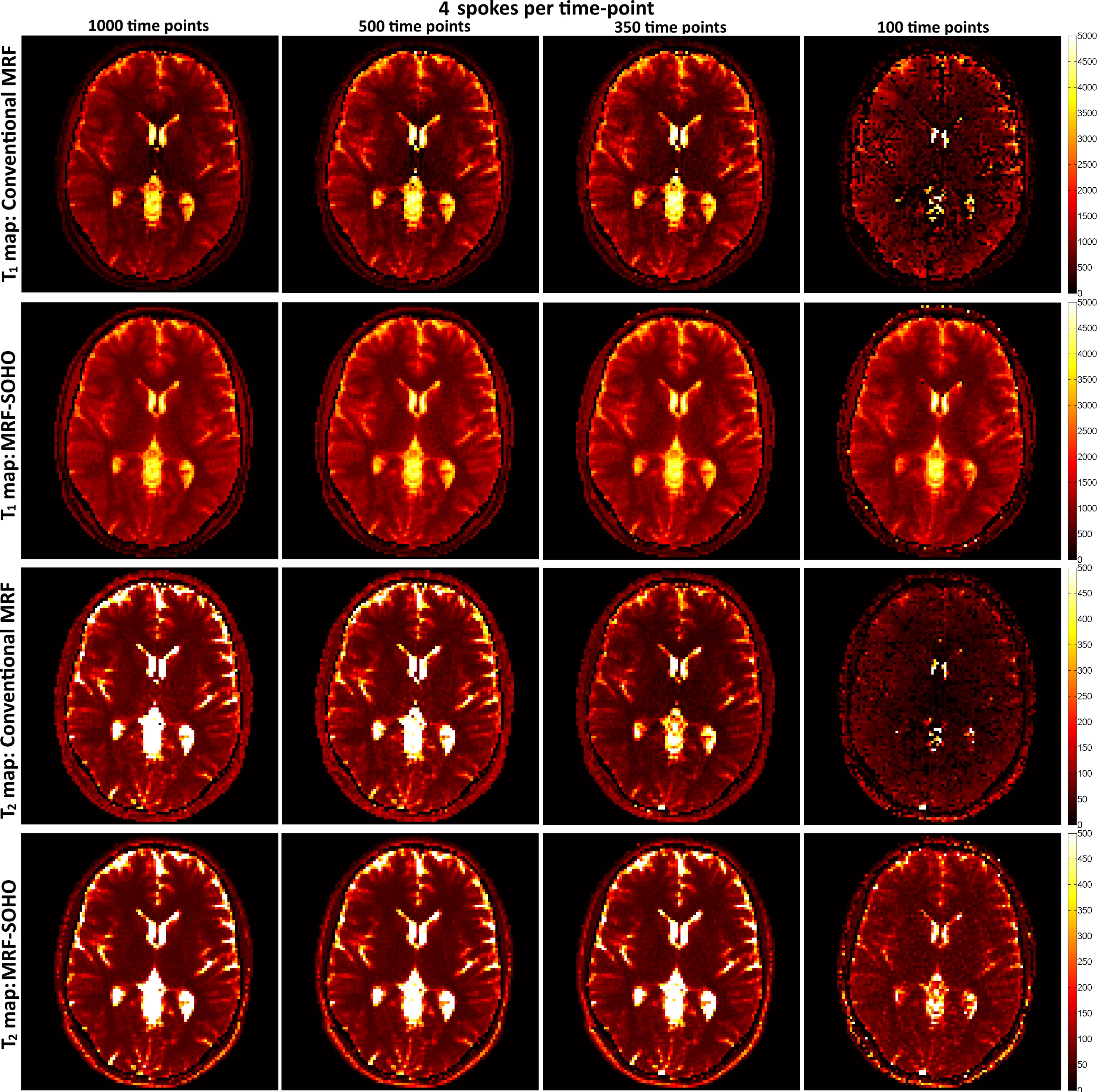
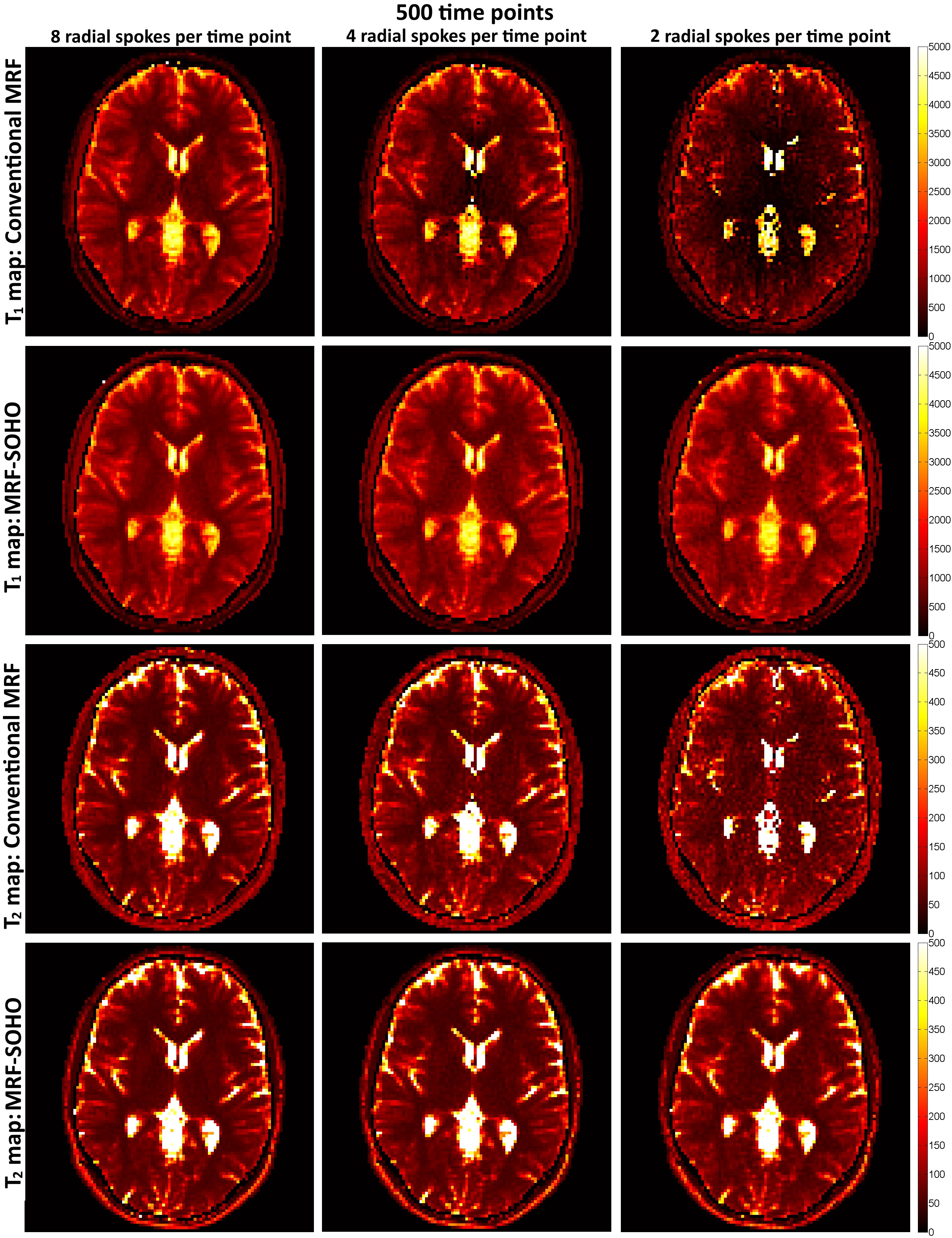
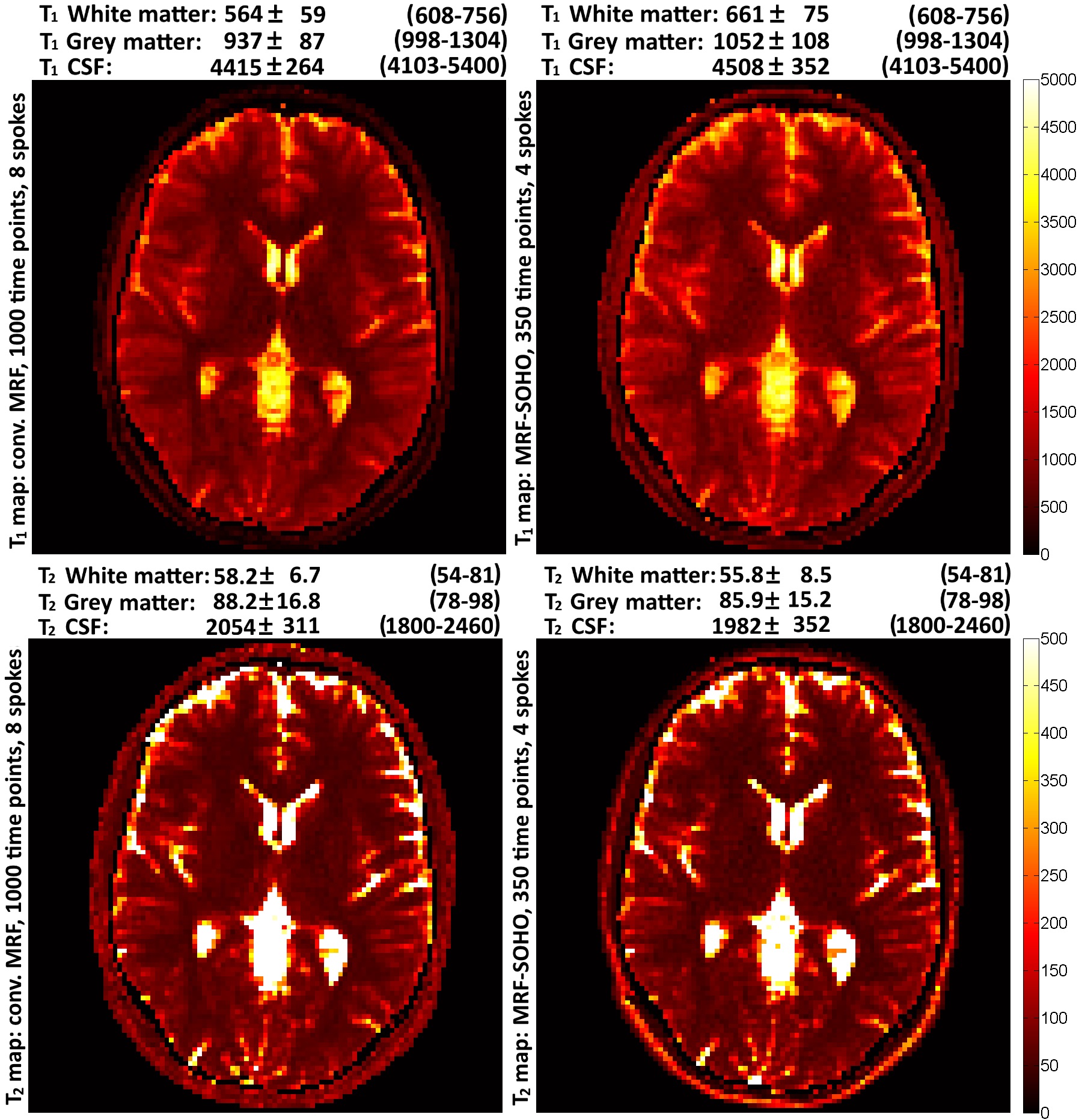
Plots of the measured T1 and T2 values compared with ground-truth values in the phantom are presented in Figure 2. Conventional MRF consistently underestimated T1 and T2; the proposed approach achieved higher accuracy and precision in all cases. T1 and T2 in-vivo brain maps for 4 radial spokes and 1000, 500, 350 and 100 time-points are presented in Figure 3 for conventional MRF and MRF-SOHO. MRF-SOHO is robust to all cases, where conventional MRF fails at reduced time points. T1 and T2 in-vivo brain maps for 500 time points and 8, 4 and 2 radial spokes are shown in Figure 4 for MRF and MRF-SOHO approaches. Aliasing artefacts are observed for conventional MRF with 4 and 2 radial spokes, whereas a significant reduction of these artefacts is observed with the proposed MRF-SOHO approach. The optimal MRF-SOHO accelerated dataset was experimentally determined to be ~350 time-points, 4 spokes. Parametric maps for the standard MRF (1000 time-points, 8 spokes) and the MRF-SOHO (350 time-points, 4 spokes; ~5.7× accelerated relative to standard MRF) are shown in Figure 5, alongside T1 and T2 measurements for white matter, grey matter and cerebrospinal fluid. All estimated values were in agreement with literature, despite a slight underestimation of T1 values in conventional MRF.Conclusion
A novel approach for highly accelerated MRF was proposed, based on data sharing of high frequency k-space. The proposed MRF-SOHO achieved acceleration factors of ~5.7× relative to conventional undersampled MRF while maintaining accurate T1 and T2 map estimations. Future work will further study the acceleration limit of MRF-SOHO with additional in-vivo experiments.Acknowledgements
This work was supported by EPSRC EP/P001009/1 and FONDECYT 1161055.References
1. Ma D et al. Magnetic Resonance Fingerprinting. Nature. 2013; 495:187-192
2. Pruessman et al. Advances in sensitivity encoding with arbitrary k-space trajectories. MRM. 2001; 46:638-651
3. Johnson et al. Improved Least Squares MR Image Reconstruction Using Estimates of k-Space Data Consistency. MRM. 2012; 67:1600-1608
4. Song et al. Non-Contrast Enhanced 4-D Dynamic MRA with Golden Angle Radial Acquisition and K-space Weighted Image Contrast (KWIC) Reconstruction. MRM. 2004; 52:815-824
5. Weigel. Extended phase graphs: Dephasing, RF pulses, and echoes - pure and simple. JMRI. 2015; 41:266-295
6. Captur et al. A T1 and ECV phantom for global T1 mmaping quality assurance: the T1 mapping and ECV standardisation in CMR (T1MES) program. J Cardiov Magn Reson. 2016; 18:1-3
7. Wundrak et al. Golden ratio sparse MRI using tiny golden angles. MRM. 2016; 75: 2372–2378.
8. Jiang et al. MR Fingerprinting Using Fast Imaging with Steady State Precession (FISP) with Spiral Readout. MRM. 2015; 74:1621-1631
Figures