0129
Applications of Low Rank Modeling to Fast 3D Magnetic Resonance Fingerprinting (MRF)1Radiology, Case Western Reserve University, Cleveland, OH, United States, 2The Florey Institute of Neuroscience and Mental Health, Melbourne, Australia
Synopsis
The goal of this study is to accelerate the acquisition time of 3D magnetic resonance fingerprinting (MRF) using a low-rank model-based method kt-SVD-MRF. With a total factor of 144 acceleration rate, 3D T1, T2 and proton density (M0) maps can be acquired from a whole brain scan with a resolution of 1.17x1.17x3 mm3 in 2.7 minutes.
Introduction
The goal of this study is to accelerate the acquisition time of 3D magnetic resonance fingerprinting (MRF)1,2,3 using a low-rank model-based method kt-SVD-MRF4,5. Several low-rank model-based reconstruction methods have been proposed to exploit the spatiotemporal correlation and data redundancy of the MRF signal4,5,6,7. This study extends the kt-SVD-MRF4,5 method to 3D MRF, which allows a total factor of 144 acceleration as compared to the Nyquist rate, such that 3D T1, T2 and proton density (M0) maps can be acquired from a whole brain scan with a resolution of 1.17x1.17x3 mm3 in 2.7 minutes.Methods
3D MRF with FISP readout2 was implemented using a 3D slab-selective RF pulse with an optimized excitation profile. A sampling scheme with an in-plane acceleration factor of 48 and a through plane acceleration factor of 3 was achieved by applying the single-shot spiral variable density sampling (VDS) in plane and a uniform undersampling pattern through plane3. In [4], the acquisition is based on a TrueFISP readout able to produces off-resonance maps. By switching to a FISP readout, the off-resonance immunity should reduce the dimensionality of the signal, maintaining the viability of the reconstruction technique with the higher 3D acceleration factor. As in [4], a two-step low-rank model-based reconstruction was implemented: the undersampled k-space data were first reconstructed using a temporal compression SVD method8. An initial estimate including quantitative maps and fitted image series was generated by directly matching the reconstructed images to the dictionary. The fitted image series were then used to generate a low rank subspace to update the undersampled k-space data. Finally, the sampled k-space data were reinjected to the updated k-space to enforce data consistency. After this two-step update, the raw data were fully sampled and were reconstructed and matched to the dictionary again to generate the final T1, T2 and M0 maps. The gpu-nufft toolbox9 was used in the reconstruction to accelerate the post processing time.Acquisition
A phantom and an in vivo scan with a FOV of 300x300x144 mm3 and a matrix size of 256x256x48 were performed in a Siemens 3T Skyra system with a 16-channel head array. For each partition, 720 time-points were acquired. A 3-second waiting time was added in between the acquisition of neighboring partitions to allow for relaxation and to improve SNR. The total acquisition time was 2.7 minutes for the 3D brain scan. An additional 3D Bloch Siegert B1 scan10 with a 70-second acquisition time was performed before each of the 3D MRF scan to correct for the B1 inhomogeneity from the MRF results11.Results
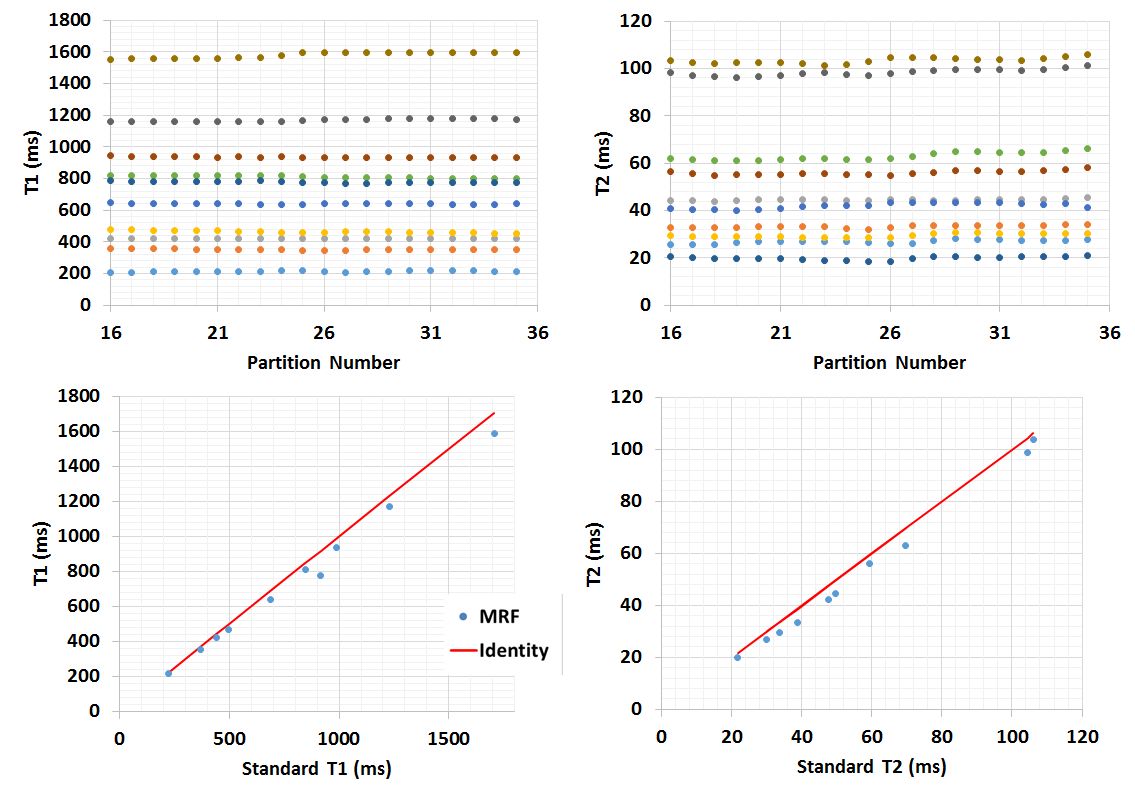
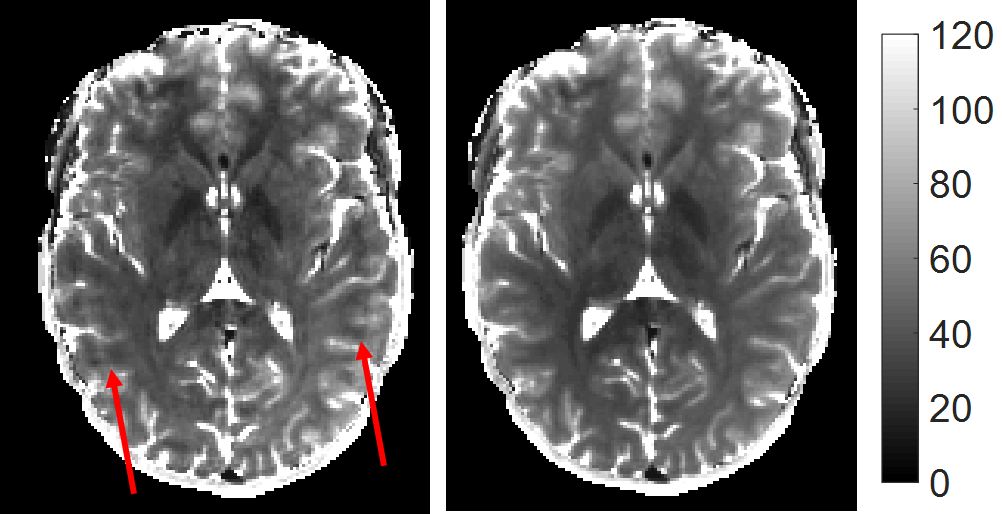
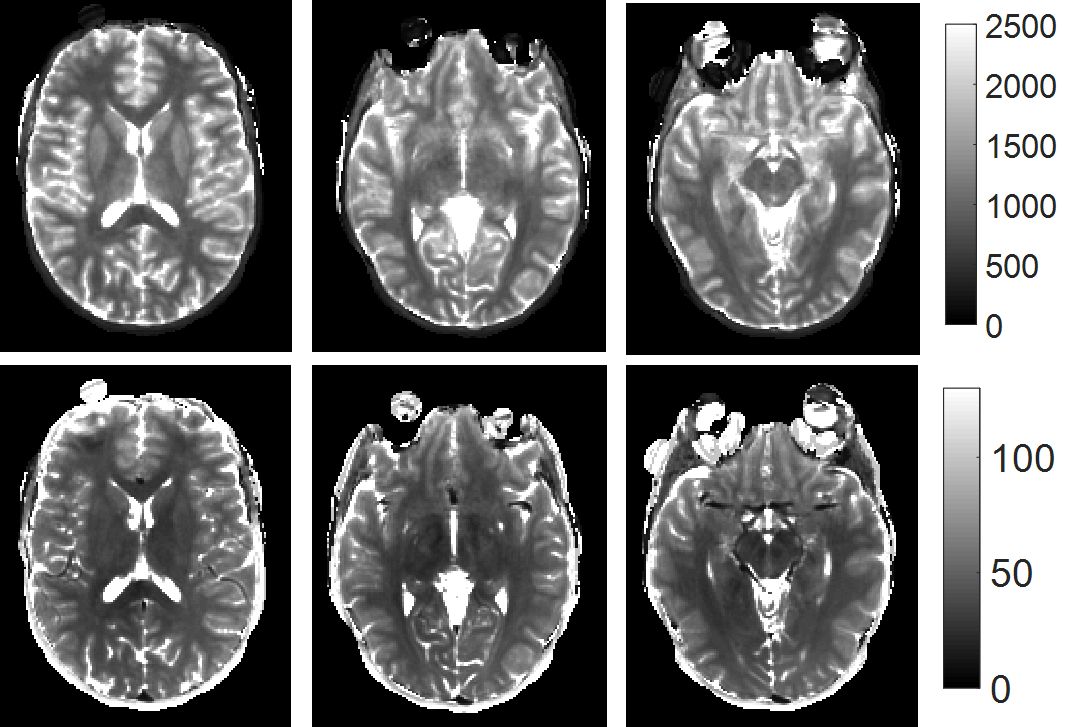
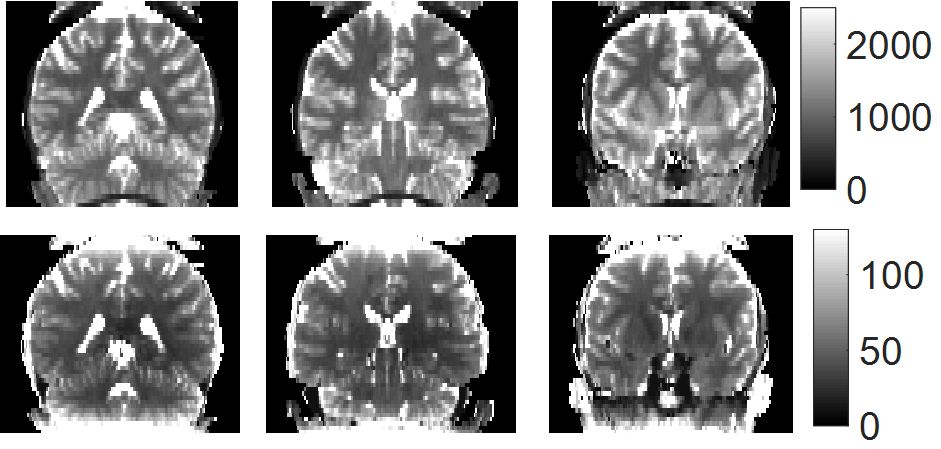
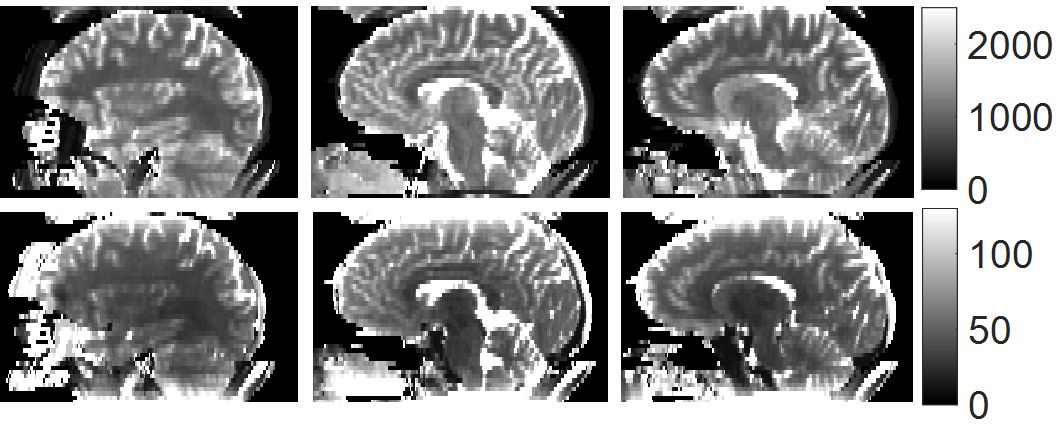
The entire reconstruction time was 80 minutes for a 3D in vivo scan, with 91% of the time used for gridding. Figures 1 shows the results from 10 cylindrical phantoms with different T1 and T2 combinations. By using a 3D pulse, the excitation profile is relatively flat in the central 20 partitions (the full length of the phantom). The average T1 and T2 values across these 20 partitions are in good agreement with the values estimated from the standard spin-echo measurements. Figure 2 compares an example T2 map obtained without and with the kt-SVD MRF method from the in vivo scan. The kt-SVD-MRF improves the image quality by removing the aliasing artifacts and balancing T2 values between the left and right hemispheres. Figures 3 to 5 display the T1 and T2 maps from different partitions of an in vivo study, in transversal, coronal and sagittal views, respectively.Discussion
This study applied a low-rank model-based reconstruction method kt-SVD-MRF to the 3D MRF scans in order to accelerate the acquisition and improve the image quality. With a 2.7 minute MRF scan and a 70 second B1 scan, T1, T2, M0 and B1 maps with a 1.2x1.2x3mm3 spatial resolution can be obtained. The kt-SVD-MRF method substantially reduces the acquisition time, since 1500 to 2000 images are typically required to generate maps with comparable image quality from the direct matching3. Because the method is k-space based and does not require iterative reconstruction, it also noticeably reduces the post processing time as compared to iterative low-rank reconstruction methods.Acknowledgements
The authors would like to acknowledge funding from Siemens Healthcare and NIH grants NIH 1R01EB016728-01A1 and NIH 5R01EB017219-02References
1. Ma D, Gulani V, Seiberlich N, Liu K, Sunshine JL, Duerk JL, Griswold MA. Magnetic Resonance Fingerprinting. Nature 2013;495:187–192. doi: 10.1038/nature11971.
2. Jiang Y, Ma D, Seiberlich N, Gulani V, Griswold M a. MR fingerprinting using fast imaging with steady state precession (FISP) with spiral readout. Magn. Reson. Med. 2014;0. doi: 10.1002/mrm.25559.
3. Ma D, Hamilton J, Jiang Y, Seiberlich N, Griswold M. Fast 3D Magnetic Resonance Fingerprinting (MRF) for Whole Brain Coverage in Less than 3 minutes. Proc. 24th Sci. Meet. Int. Soc. Magn. Reson. Med. 2016, 3180.
4. Pierre E, Griswold A. Mark, Connelly Alan. Fast Analytical Solution for Extreme Unaliasing of MRF Image Series. Proc. 25th Sci. Meet. Int. Soc. Magn. Reson. Med. 2017, submitted
5. Doneva Mariya, Amthor Thomas, Koken Peter, Sommer Karsten, Bornert Peter. Low Rank Matrix Completion-based Reconstruction for Undersampled Magnetic Resonance Fingerprinting Data. Proc. 24th Sci. Meet. Int. Soc. Magn. Reson. Med. 2016, 0432.
6. Zhao B, Setsompop K, Gagoski B, Ye H, Adalsteinsson E, Grant E, Wald L, A Model Based Approach to Accelerated Magnetic Resonance Fingerprinting Time Series Reconstruction. Proc. 24th Sci. Meet. Int. Soc. Magn. Reson. Med. 2016, 0871.
7. Liao C, Cao X, Ye H, Chen Y, He H, Chen S, Ding Q, Lui H, Zhong J, Acceleration of MR Fingerprinting with Low Rank and Sparsity Constraint. Proc. 24th Sci. Meet. Int. Soc. Magn. Reson. Med. 2016, 4227.
8. McGivney D, Pierre E, Ma D, Jiang Y, Saybasili H, Gulani V, Griswold MA. SVD Compression for Magnetic Resonance Fingerprinting in the Time Domain. IEEE Trans. Med. Imaging 2014;62:1–13. doi: 10.1109/TMI.2014.2337321.
9. Knoll, F.; Schwarzl, A,; Diwoky, C.; Sodickson DK.: gpuNUFFT - An Open-Source GPU Library for 3D Gridding with Direct Matlab Interface. Proc ISMRM p4297 (2014).
10. Sacolick LI, Wiesinger F, Hancu I, Vogel MW. B1 mapping by Bloch-Siegert Shift. Magn. Reson. Med. 2010;63:1315–1322. doi: 10.1002/mrm.22357.
11. Chen Y, Jiang Y, Pahva Shivani, Ma D, Lu L, Tweig MD, Wright KL, Seiberlich N, Griswold MA, Gulani V. MR Fingerprinting for Rapid Quantitative Abdominal Imaging. Radiology 2016;0:1–9.
Figures