4608
The influence of B0 drift on the performance of the PLANET method and an algorithm for correction1Center for Image Sciences, Imaging Division, UMC Utrecht, Utrecht, Netherlands, 2Department of Radiotherapy, Imaging Devision, UMC Utrecht, Utrecht, Netherlands
Synopsis
The PLANET method has been recently proposed to quantify the relaxation parameters T1 and T2, the banding free magnitude, the local off-resonance ∆f0, and the RF phase from RF phase-cycled balanced steady-state free precession (bSSFP) data. The PLANET model requires a static B0 field over the course of the acquisition. However, due to gradient activity, B0 drift can happen. In this work we present a study of the influence of B0 drift on the performance of the method and we propose a strategy for correction.
Purpose
The PLANET method was introduced to simultaneously map T1 and T2, the banding free magnitude, the local off-resonance, and the RF phase using phase-cycled bSSFP data [1]. The method is based on linear least squares fitting of an ellipse to bSSFP data in the complex signal plane and subsequent analytical parameter estimation from the fitting results. The PLANET model requires a static B0 field over the course of PLANET acquisition. In practice, however, drift can occur. The purpose of this work was to investigate the influence of B0 drift on the performance of the PLANET method and to propose a strategy for correction.Methods
The complex phase-cycled bSSFP signal without drift can be represented as [2,3]:
$$$I = M_{eff}\frac{1-ae^{i(2πTRΔf_{0}+Δ\theta)}}{1-b\cos(2πTRΔf_{0}+Δ\theta)}e^{i(2πTEΔf_{0}+φ_{RF})} $$$ [1]
where Meff, a, b depend on T1, T2, TR, FA. ∆θ is the user-controlled RF phase increment, Δf0 is the local off-resonance, φRF is the combined RF transmit and receive phase.
With frequency drift modeled as Δf0 → Δf0 + Δfdrift(t), Eq. [1] becomes:
$$$ I = M_{eff}\frac{1-ae^{i(2πTRΔf_{0}+Δ\theta+2πTRΔf_{drift})}}{1-b\cos(2πTRΔf_{0}+Δ\theta+2πTRΔf_{drift})}e^{i(2πTEΔf_{0}+φ_{RF})}e^{i2πTEΔf_{drift}} $$$ [2]
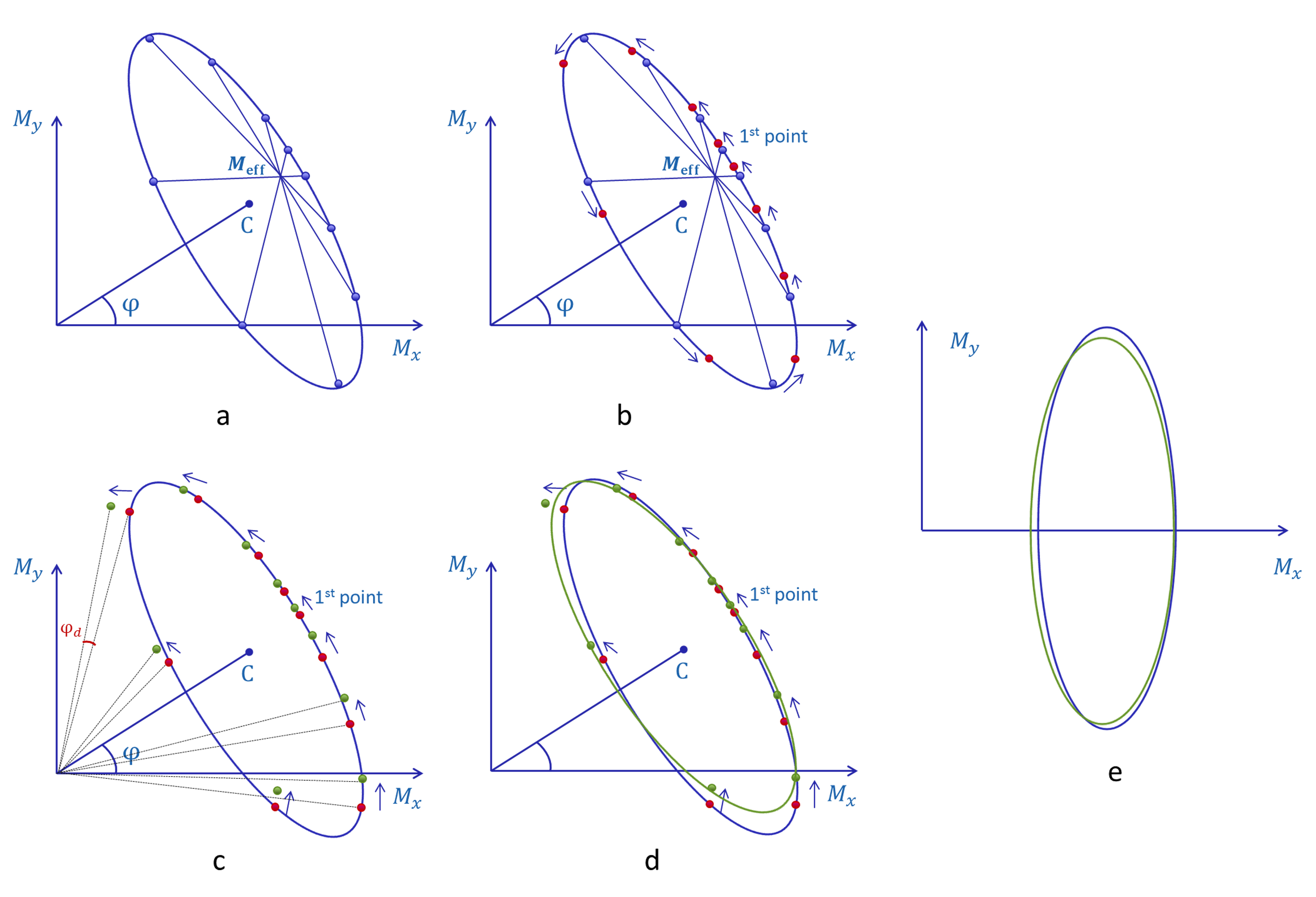
The first part of Eq.[2] multiplied by the first exponential represents the same elliptical equation as Eq.[1] with only an offset in the RF phase increment: Δθnew = Δθ +2πTRΔfdrift. This corresponds to a drift-dependent displacement of all data points along the ellipse, see Figure 1(b). The second exponential corresponds to an additional drift-dependent rotation of all data points around the origin, see Figure 1(c,d). Ignoring the presence of drift, fitting an ellipse to the ”drifted” data points leads to a different fit compared to the fit for the “non-drifted” case, see Figure (e). After performing PLANET post-processing, this would result in errors in the parameter estimates.
We propose a 3-step correction algorithm:
1. Calculation of the spatial time-dependent B0 drift during PLANET acquisition Δfdrift n (i,j)(t), where n – is the number of dynamic acquisition, t - is the time, corresponding to nth acquisition. Assuming temporally linear drift, the frequency drift over nth phase-cycled acquisition is estimated by:
$$$Δf_{drift,n} (i,j)(t)=n\frac{Δf_{total, drift}(i,j)}{N_{cycles}} $$$ (Hz), n = {1, ...Ncycles} [3]
where
total drift over PLANET acquisition Δftotal drift (i,j) is calculated
by subtracting two reference B0 maps acquired right before and after
PLANET acquisition.
2. Correction of Meff, T1, T2 by multiplying the experimental complex data by e-i2πTEΔfdrift n (i,j)(t), the geometrical equivalent of which is the rotation of the “drifted” data points around the origin back to the “non-drifted” ellipse.
3. Correction of ∆f0 and φRF by defining Δθnew (i,j)(t) = Δθ(t)+2πTRΔfdrift (i,j)(t), which geometrically moves the “drifted” data points along the ellipse back to their “non-drifted” positions. Δθ(t)– is the user controlled RF phase increment.
To test the correction algorithm, MRI experiments on a phantom (bottle filled with aqueous solution of MnCl2·4H2O) and in the brain of healthy volunteer were performed on a clinical 1.5T MR scanner (Philips Ingenia, Best, The Netherlands). A 16-channel head receive coil was used. Sequence parameter settings for 3D bSSFP: FOV 160x160x159 mm3 (phantom), 220x220x100 mm3 (the brain) , voxel size 1.1x1.1x3 mm3 (phantom), 0.98x0.98x4 mm3 (brain), TR 10 ms, FA 30˚, 10 phase cycles with Δθ = π/5. Reference B0 maps were calculated using a dual echo approach. Reference B1 maps were acquired for FA correction. Reference T1 and T2 maps were calculated using 2D MIXED method [4].
Results
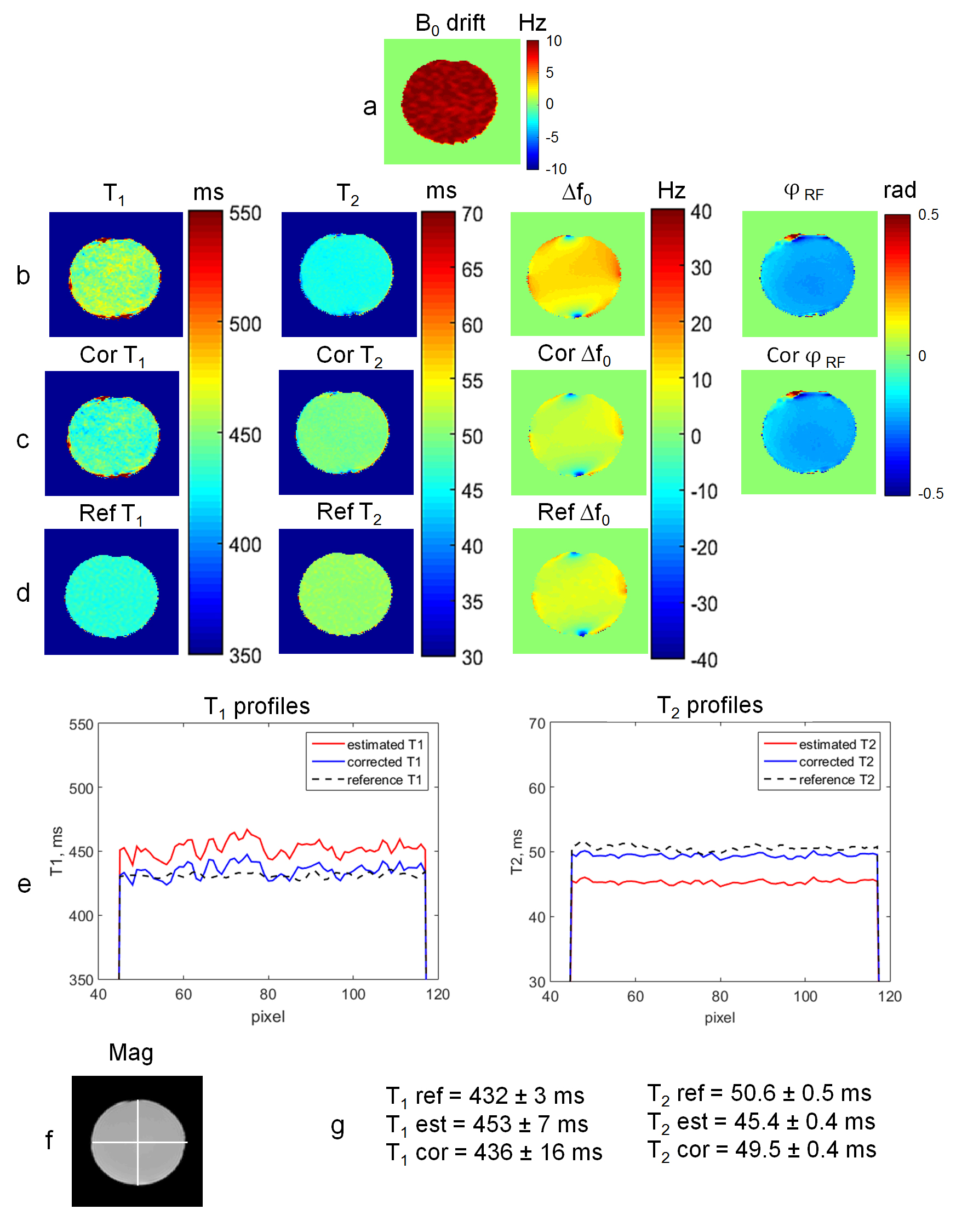
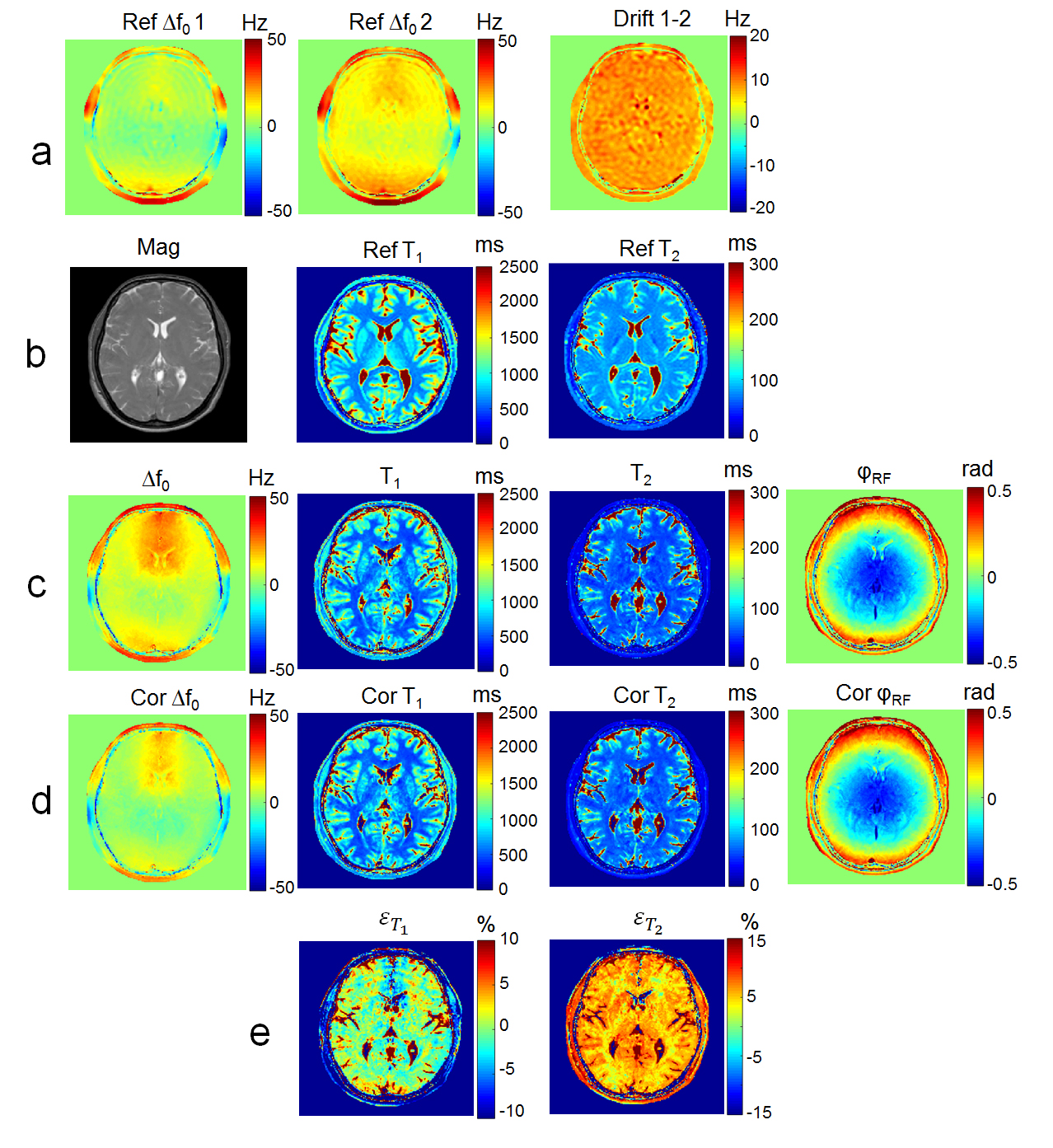
Figure 2 shows parameter maps of the phantom before and after drift correction. The average drift of 10 Hz was observed over 14-min PLANET acquisition. T1 values were overestimated by 4-5% compared to the reference values and the corrected T1 values are in agreement with the reference values with an accuracy of 1%. T2 values were underestimated by 10% compared to the reference values and after correction they are in agreement with the reference values with an accuracy of 2%. The estimated B0 map after correction is similar to the reference B0 acquired right before PLANET acquisition, which proves that the drift correction algorithm performs correctly. An average drift of 9 Hz was observed over 11-min PLANET acquisition in the brain. The estimated quantitative parameter maps before and after drift correction are shown in Figure 3. The reference T1 and T2 maps are shown for comparison. After drift correction, T1 values increased by around 1-2%, T2 values increased by around 5-7%. The corrected B0 map is approaching the reference B0 map acquired right before the PLANET acquisition, as expected.Discussion and conclusion
We have demonstrated that PLANET method is sensitive to B0
drift. Here we proposed a strategy for correction and experimentally
demonstrated the effect of B0 drift and the performance of the
correction. The implemented linear drift correction algorithm successfully
improved the quantitative parameter estimation.Acknowledgements
This research was supported by The Netherlands Foundation for Scientific Research Institutes (NWO) , Domain Applied and Engineering Sciences; grant 12813.References
(1) Shcherbakova et.al. Magn. Reson. Med. 00 (2017); (2) Xiang et.al. Magn. Reson. Med. 71 (2014); (3) Lauzon et.al. Concepts Magn.Reson. 34A (2009); (4) In den Kleef JJ et. al. Magn. Reson. Med. 5 (1987)Figures