4592
A fast approach for estimation of Spark of the sensing matrix for Compressed Sensing applications.1Radiology, Case Western Reserve University, Cleveland, OH, United States, 2Department of Biomedical Engineering, Cleveland Clinic, Cleveland, OH, United States
Synopsis
Compressed sensing (CS) has been extensively used with wide spread application in MRI and other signal processing fields. Spark of the sensing matrix is at the heart of the CS framework for determining the success of the signal recovery for a given designed CS system. However, estimation of Spark of the sensing matrix is a combinatorial process, thus, practically difficult to estimate for realistic sizes of sensing matrices. The purpose of this work is to present a new optimization-problem-based approach for estimation of the Spark of the sensing matrix which will overcome the existing limitations, thereby, a tool to assess and design CS framework based systems.
Purpose & Introduction:
Compressed sensing (CS)[1-3] has been extensively used with wide spread application in MRI[4] and other signal processing fields[5]. CS has been instrumental in the past decade in battling the acquisition speed limit of MRI. In order to use the CS framework for a particular application, one needs to address the following questions: What is the optimal sparsifying transform for their application? What is the best sampling pattern for a given design? What is the highest possible acceleration factor? Is the current system design achieving it? When would a given system fail? etc. For vast majority of CS applications, these questions have been answered heuristically or intuitively. However, these approaches might not suffice for certain scenarios, for instance, usage of the CS framework for clinical application or hardware implementation of CS. One of the primary reasons for the use of heuristic or intuitive approaches is that the existing assessment tools are either impractical to use for realistic systems or they provide a rough assessment of the system, which might be far away from underlying theoretical bounds. For example, Spark or Restricted isometry property (RIP) of the sensing matrix are at the heart of the CS framework for determining the success of the signal recovery for a given designed CS system[2,3,6]. However, estimation of Spark or RIP is a combinatorial process, thus, practically difficult to estimate for realistic sizes of sensing matrices. Thus, in this work we focus on developing a tool to assess the sensing system/matrix. Specifically, the purpose of this work is to present a new optimization-problem-based approach for estimating the Spark of the sensing matrix which will overcome the existing limitations.Theory:
In general, we are looking to solve the following inverse problem
$$Sx_0=y\quad\quad\quad(1)$$
where $$$S\in\mathbb{C}^{M\times N}$$$ is the sensing matrix with $$$M<N,x_0\in\mathbb{C}^{N}$$$ is the ground truth object in the desired transform domain and $$$y\in\mathbb{C}^{M}$$$ is the sampled data. The solution space for a given $$$S$$$ and $$$y$$$ is
$$\{x |x=x_0+n,n\in null(S)\}\quad\quad\quad(2)$$
Donoho et. al.[3] defined Spark of matrix A, as the smallest possible number of columns from A that are linearly dependent. Using this definition Donoho et. al.[3] laid down the theoretical limit and thereby the sampling theorem of the CS framework. They proved that, for any $$$k$$$-sparse, $$$x_0$$$, to be the sparsest element within the solution space, the following condition should be satisfied[3]
$$\parallel\space n\space\parallel_0\space>\space2k\quad\quad\forall\space n\in\{n|Sn=\bar{0},n\neq\bar{0}\}\quad\quad\quad(3)$$
Thus, Spark is at the heart of the assessment of guaranteed signal recovery for a given system. The brute force approach to estimate Spark requires combinatorial assessment of the columns of the sensing matrix. To the best of our knowledge, currently there is no approach for estimating Spark in practically feasible time for realistic sizes of sensing matrices. Mutual coherence is a surrogate measure and could be far away from the actual value of the Spark[2,3,5]. Since Spark is by definition the $$$\ell_0$$$ norm of the sparsest element of the subspace $$$\{ n|Sn=\bar{0},n\neq \bar{0}\}$$$, we propose to estimate Spark by solving the following optimization problem.
$$\min_n\space\parallel n\parallel_1\quad\quad subject\space to\space Sn=\bar{0} \space and\space\parallel n\parallel_2=1\quad\quad\quad(4)$$
where Spark would be the $$$\ell_0$$$ norm of the solution of the optimization problem in equation (4).
Methods:
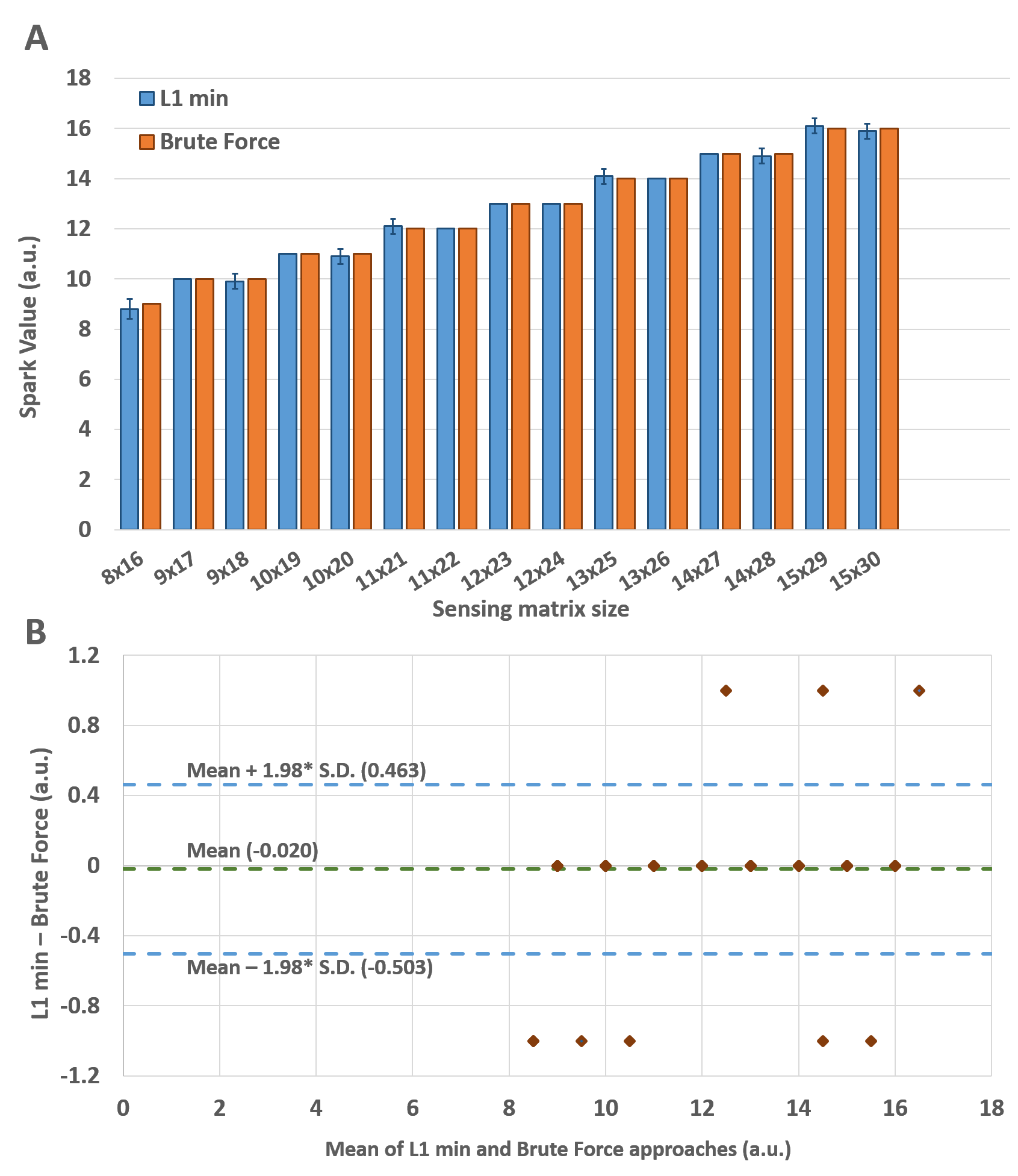
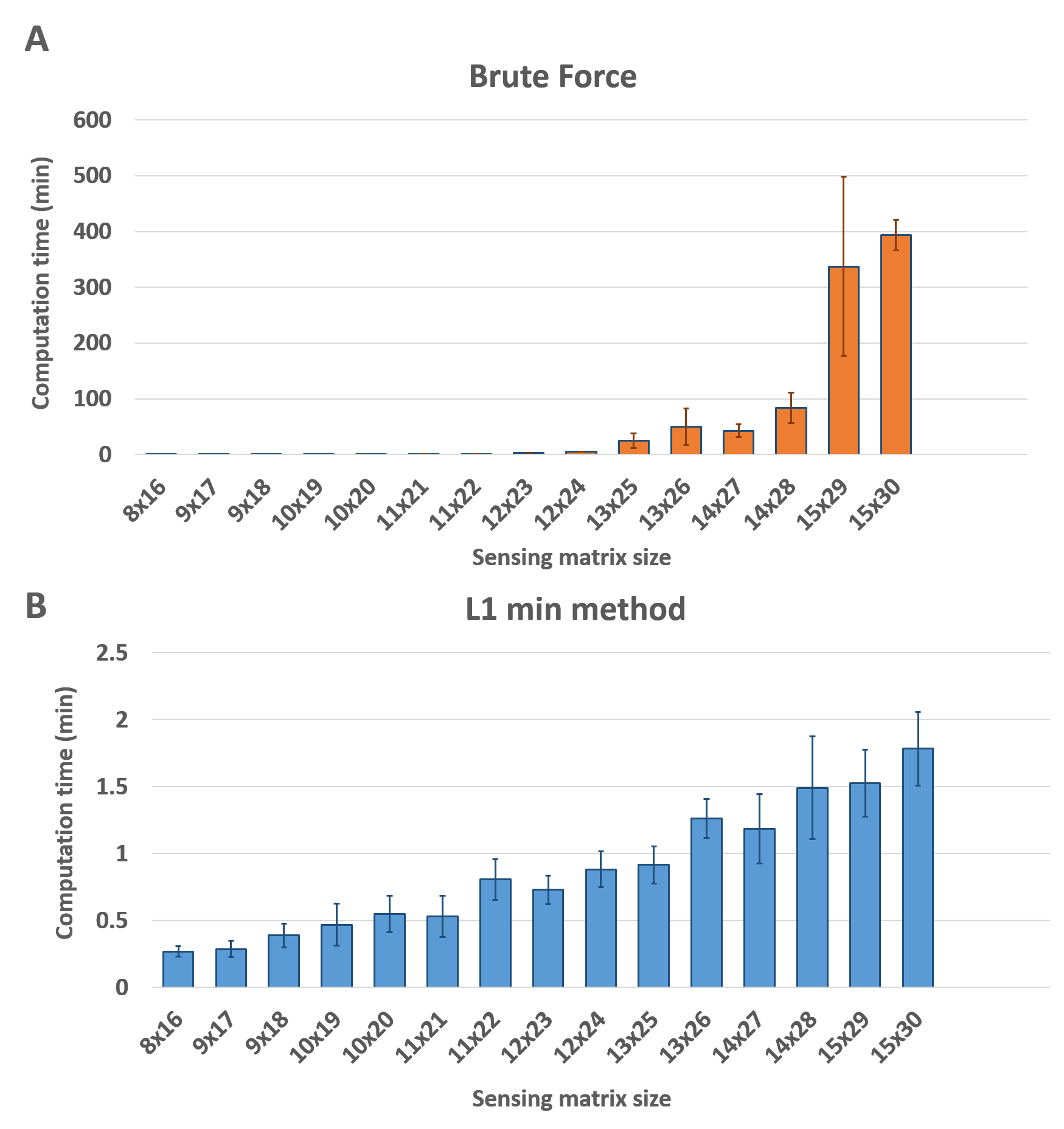
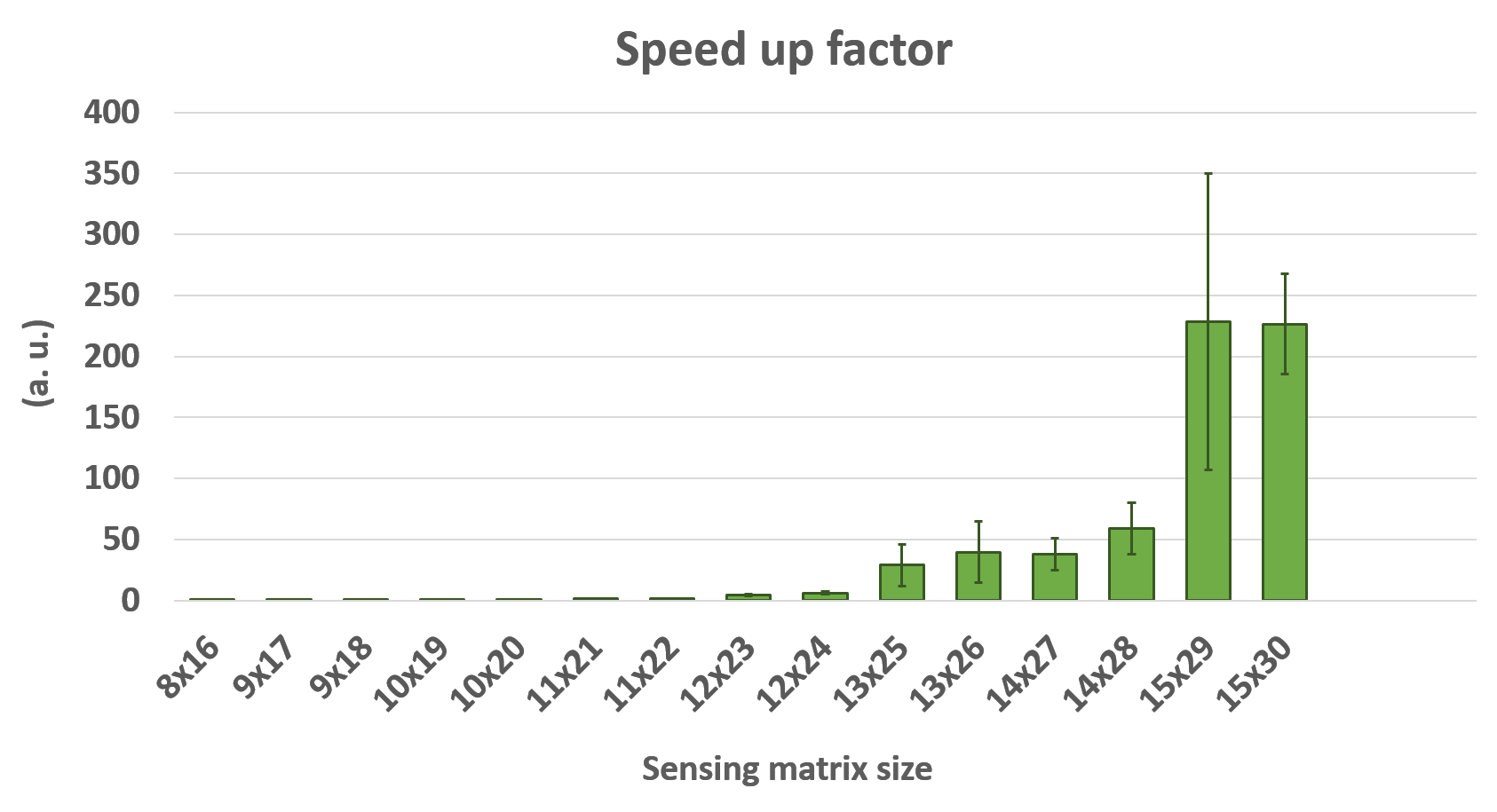
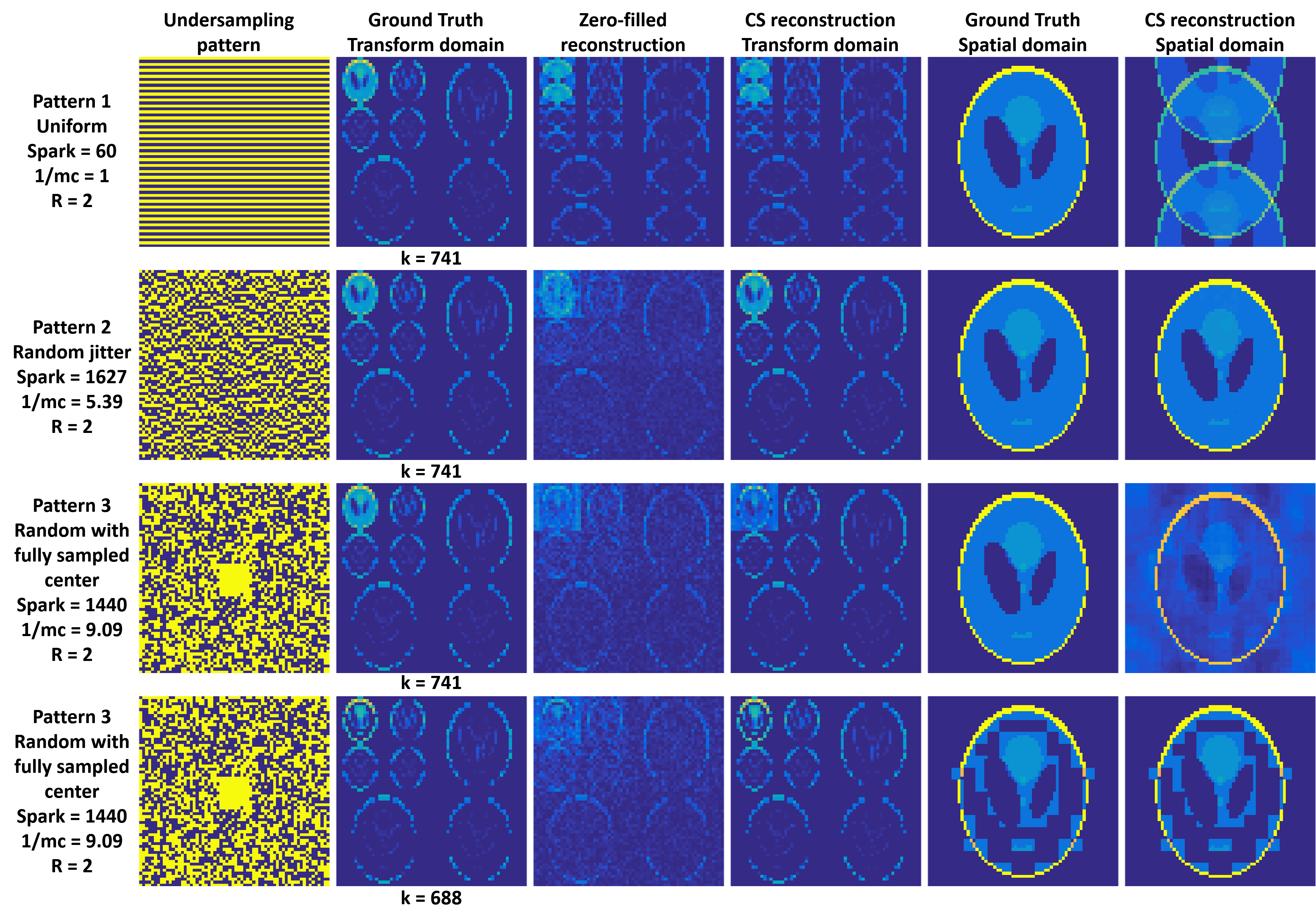
For assessment of the approach we performed Monte Carlo (10 repetitions) based simulations, where sensing matrices were generated with sizes ranging from 8 by 16 to 15 by 30. The sensing matrices were generated randomly using a uniform distribution. For each sensing matrix, the value of Spark was estimated through two approaches, namely, the brute-force approach and the proposed optimization-based approach. The steps for brute-force approach are shown in figure 1. For the optimization-based approach, equation 4 was solved using interior-point algorithm. The accuracy and computation time of the proposed approach was evaluated by comparing with the brute-force approach. Finally, the proposed approach was used to compare three sampling patterns and evaluated using CS reconstruction of the Shepp-Logan phantom.Results & Discussions:
Figure 2 illustrates the agreement between the two approaches for different sizes of sensing matrix. Figure 3 and 4 show the proposed approach substantially reduces the estimation time of Spark. Figure 5 illustrates the estimated Spark value identifies which sampling pattern is more suitable for the given system design. Furthermore, it also accurately predicts the feasibility of the CS reconstruction given the sparsity of the underlying signal.Conclusion:
The proposed approach provides a fast, accurate and practically feasible means for estimation of Spark for realistic sizes of sensing matrices, thereby, a tool to assess and design CS framework based systems.Acknowledgements
The authors would like to acknowledge funding from Siemens Healthcare. This work made use of the High Performance Computing Resource in the Core Facility for Advanced Research Computing at Case Western Reserve University.References
1. D. L. Donoho, “Compressed sensing,” IEEE Trans. Info. Theory, vol. 52, no. 4, pp. 1289–1306, Sep. 2006.
2. E. J. Candes, “Compressive sampling,” in Int. Congress of Mathematicians, Madrid, Spain, 2006, vol. 3, pp. 1433–1452.
3. D. L. Donoho and M. Elad, “Optimally sparse representation in general (nonorthogonal) dictionaries via $$$\ell_1$$$ minimization,” Proc.Nat. Acad. Sci., vol. 100, no. 5, pp. 2197–2202, Mar. 2003.
4. M. Lustig, D. L. Donoho, and J. M. Pauly, “Sparse MRI: The application of compressed sensing for rapid MR imaging,” Magn. Res. Med.,vol. 58, no. 6, pp. 1182-1195, Dec. 2008.
5. M. Duarte and Y. Eldar, “Structured compressed sensing: From theoryto applications,” IEEE Trans. Signal Process., vol. 59, no. 9, pp. 4053–4085, Sep. 2011.
6. E. J. Candes, J. K. Romberg, and T. Tao, “Stable signal recovery from incomplete and inaccurate measurements,” Comm. Pure Appl.Math., vol. 59, no. 8, pp. 1207–1223, 2006.
Figures