4525
An accurate dictionary generation method for MR fingerprinting using a fast Bloch image simulator1MRI simulations Inc., Tokyo, Japan
Synopsis
This study proposes a simple and accurate dictionary creation method for MR fingerprinting using a fast Bloch image simulator. A typical MR fingerprinting sequence based on a FISP sequence and a numerical phantom were used for dictionary generation. Cartesian and spiral readout gradients were used for the Bloch image simulation of the numerical phantoms. MR fingerprinting parameter maps obtained by pattern matching with the dictionaries generated by the proposed method demonstrated validity and usefulness of the method. The proposed method is simple and useful for creation of accurate dictionaries in MR fingerprinting.
Introduction
MR
fingerprinting (MRF) is a novel and promising NMR parameter mapping method.1
One of the key technologies is dictionary generation for pattern matching. Until
now, one dimensional Bloch simulation for isochromats along the slicing
direction and EPG formalism2 were used for dictionary calculation.1,3
However, in these calculations, only one signal point was calculated during the
TR and the effects from acquisition trajectories have not been considered. In
this study, we calculated the entire MRF signal using a Bloch image simulator4,5
and clarified the effects from the trajectories.
Methods
A FISP-based MRF sequence3 consisted of 1000 TR units was designed for the Bloch image simulator. The TR unit consisted of a selective-excitation pulse (hamming-windowed sinc: ±2π, 3.2ms duration) with unbalanced slicing gradient and a variable-density spiral readout gradient (TE=3ms, 7.47ms sampling window, 5µs dwell-time) with 0-th moment compensation. FA was varied as sinusoidal function of 0~π for the TR_index of 0~200, 250~450, 500~700, and 750~950, and the maximum of the FA was π/4, π/2, π/4, and π/2. To enhance the T1 contrast, an inversion pulse was applied 100ms before the acquisition. The spiral trajectory was designed for 256×256 image matrices with 256mm square FOV to fill the k-space using the 48 segments separated by 7.5° rotation angle. In the MRF sequence, the rotation angle of the trajectory was incremented by 120°, 120°, 127.5°, 120°, 120°, 127.5° … to utilize the sliding window reconstruction. The MRF dictionary was acquired with the 48 repetitions of the MRF sequence with increasing the rotation angle by 7.5° (full spiral-sampling). For comparison, Cartesian sampling (TE=3ms, 1.28ms sampling window, 5μs dwell-time) MRF sequence was also used for dictionary calculation.
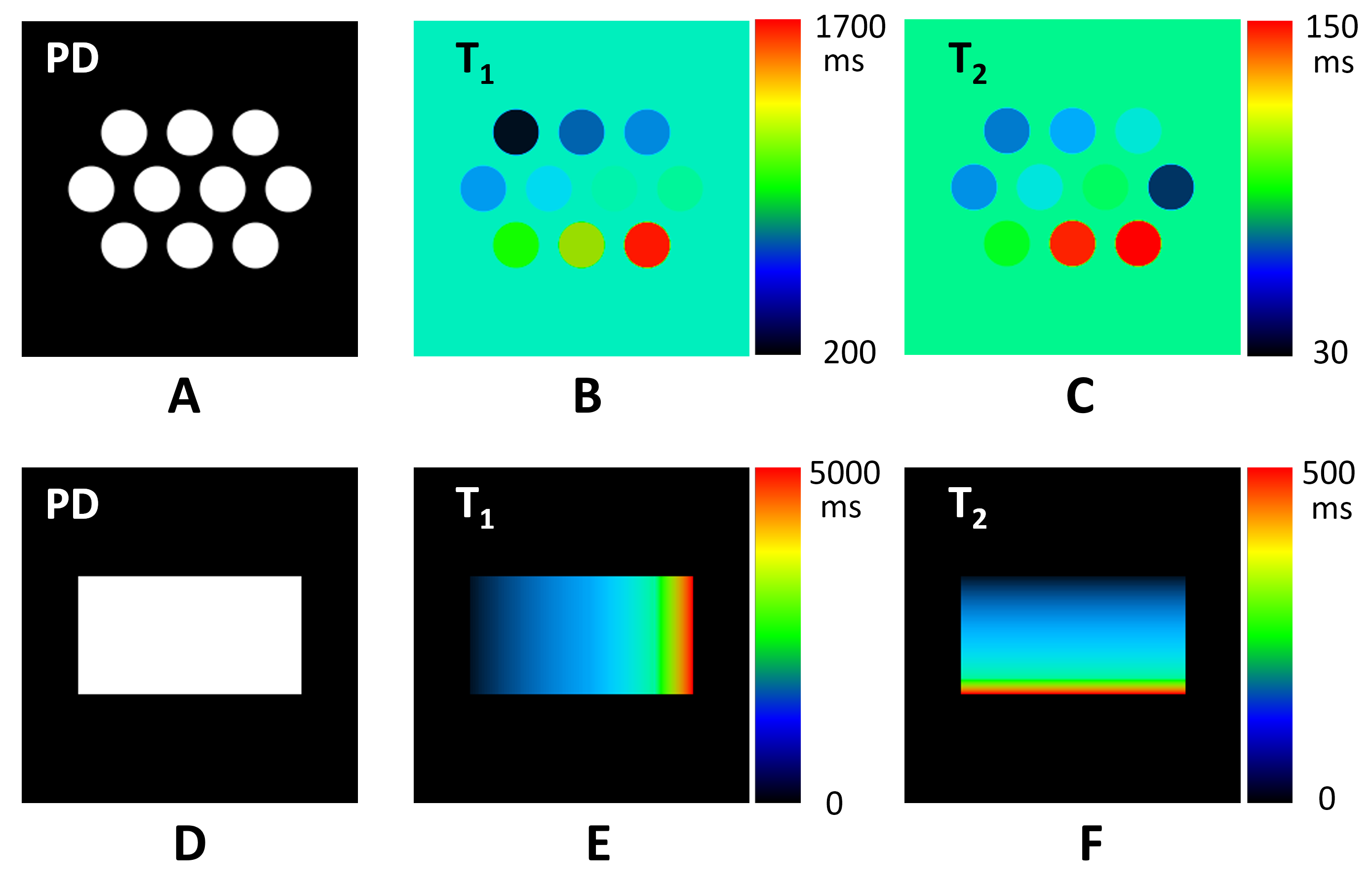
Figure
1A-C shows a relaxation-time phantom that simulated ten cylindrical containers
filled with materials having identical PD, T1 from 228 to 1666ms, and T2 from
37 to 150ms. Figure 1D-F shows a dictionary phantom filled with materials
having identical PD and all possible combinations of relaxation times. In the
dictionary phantom, T1 varied from 100 to 1000 by 10ms steps, from 1000 to 2000
by 20ms steps, and from 2000 to 5000 by 100ms steps, and T2 varied from 10 to
200 by 2.5ms steps and from 200 to 500 by 25ms steps. 9,219,072 and 13,464,000
isochromats were used for the Bloch image simulations of the numerical phantoms.
Results
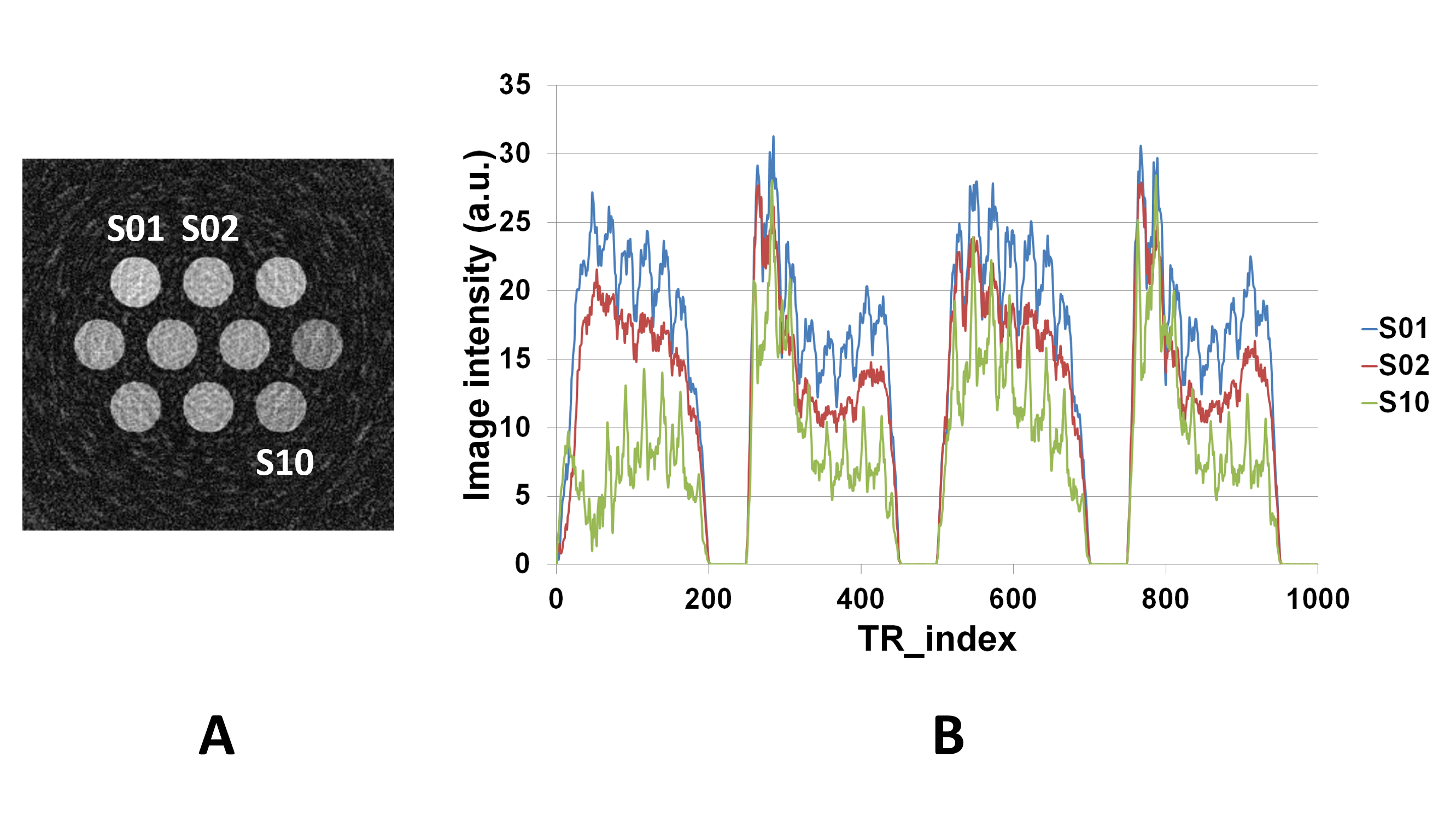
Figure 2A shows the 280th image of the relaxation-time phantom acquired with the one-shot MRF sequence and reconstructed from three consecutive signals. The temporal changes of the pixel values at the center of the cylindrical samples are shown in Figure 2B. The abrupt changes were caused by reconstruction noise. The simulation time for the one-shot MRF sequence was 137 seconds.
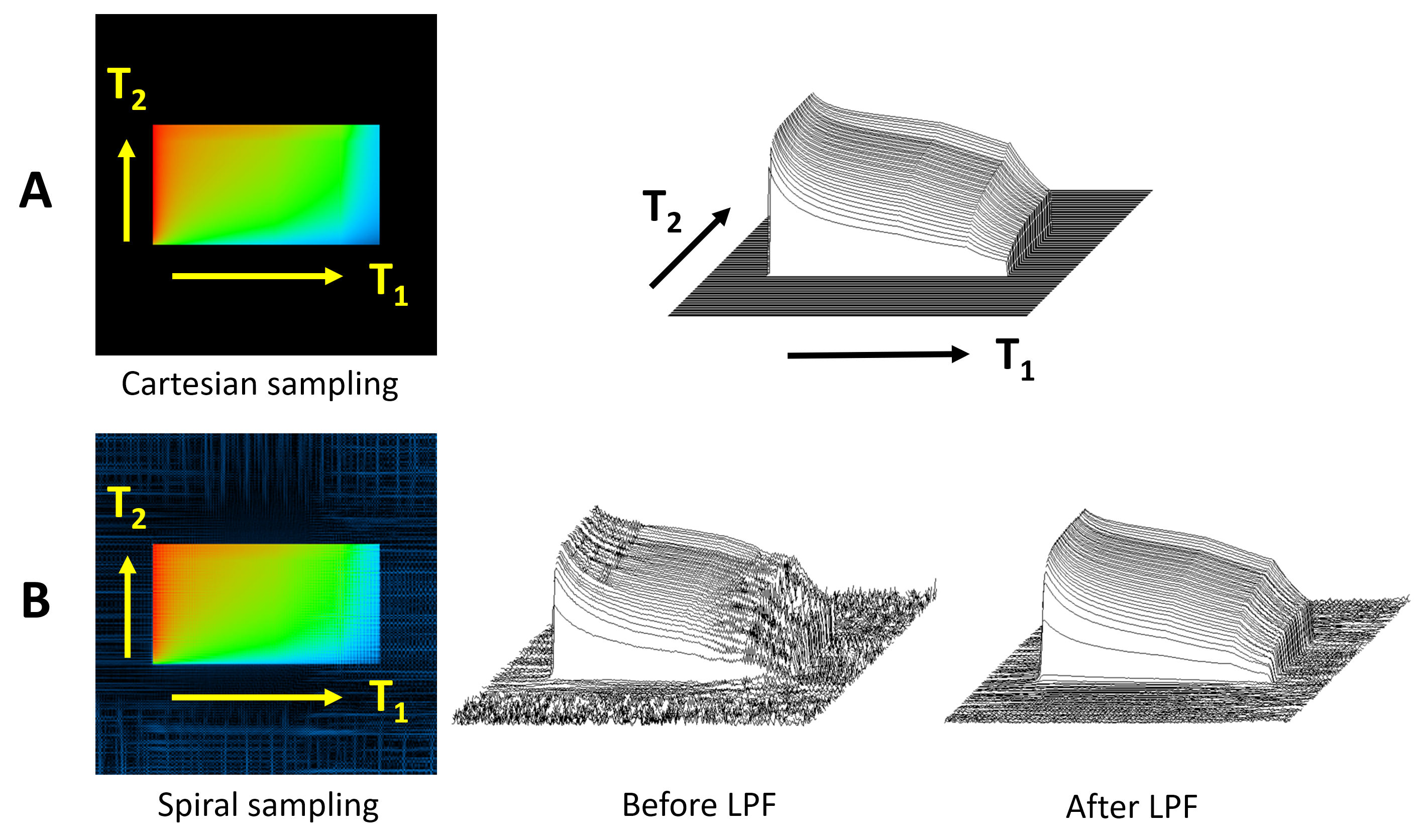
Figure 3 shows images selected from the image series of the dictionary phantom acquired with the full MRF sequences. The simulation times for the dictionaries were 5.89 and 2.75 h. No noticeable artifacts were seen in the image by Cartesian sampling, whereas remarkable reconstruction noise appeared in that by the spiral sampling. However, reconstruction noise was almost removed by the LPF. Therefore, we used the image dataset obtained from the Cartesian-sampling and the low-pass filtered image dataset obtained from the spiral sampling for the dictionary matching.
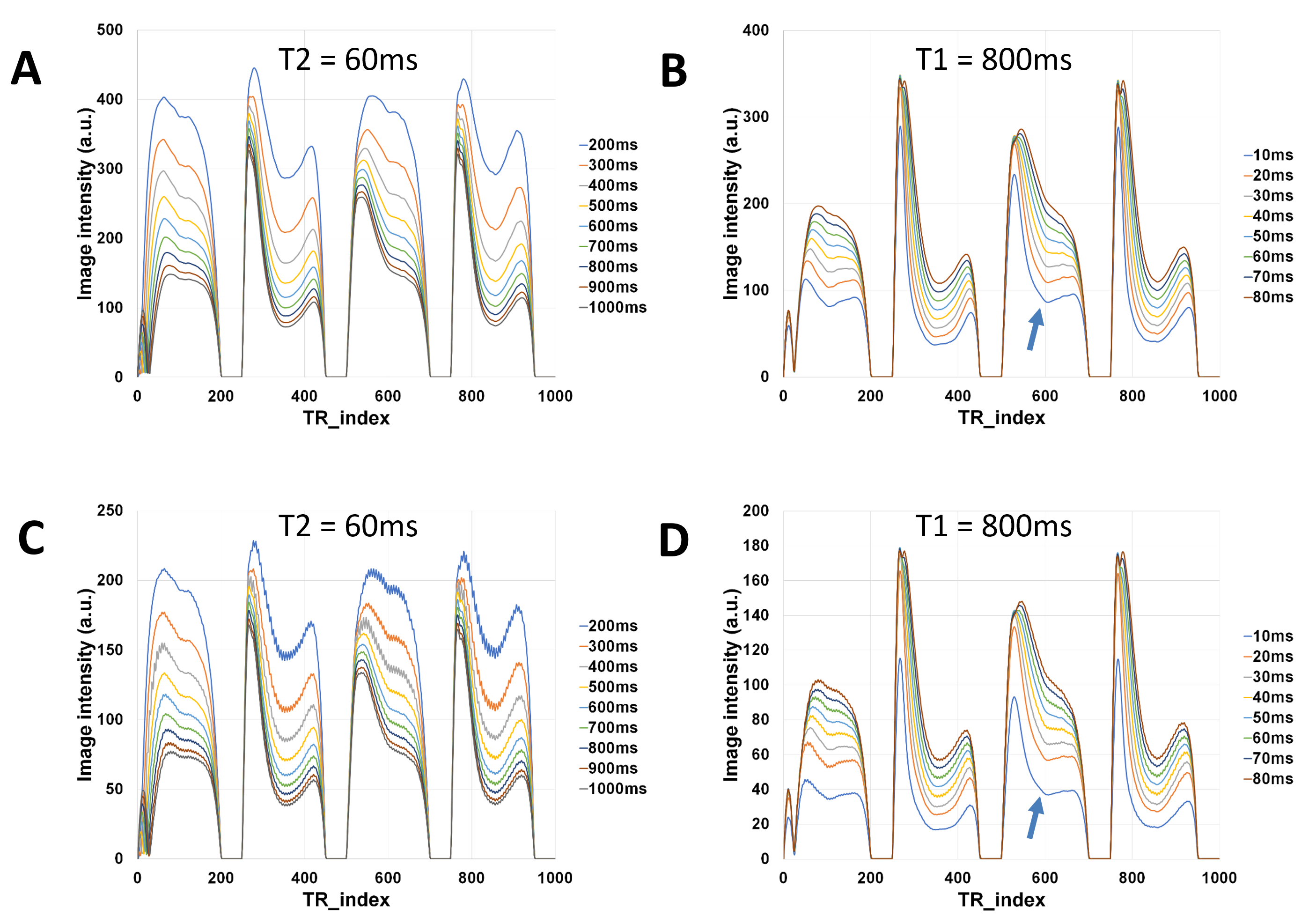
Figure 4 shows temporal changes in the image intensity of the MRF dictionaries. Although two dictionary datasets presented almost the same changes, remarkable intensity decrease in shorter T2 entries for the spiral sampling dictionary was observed.
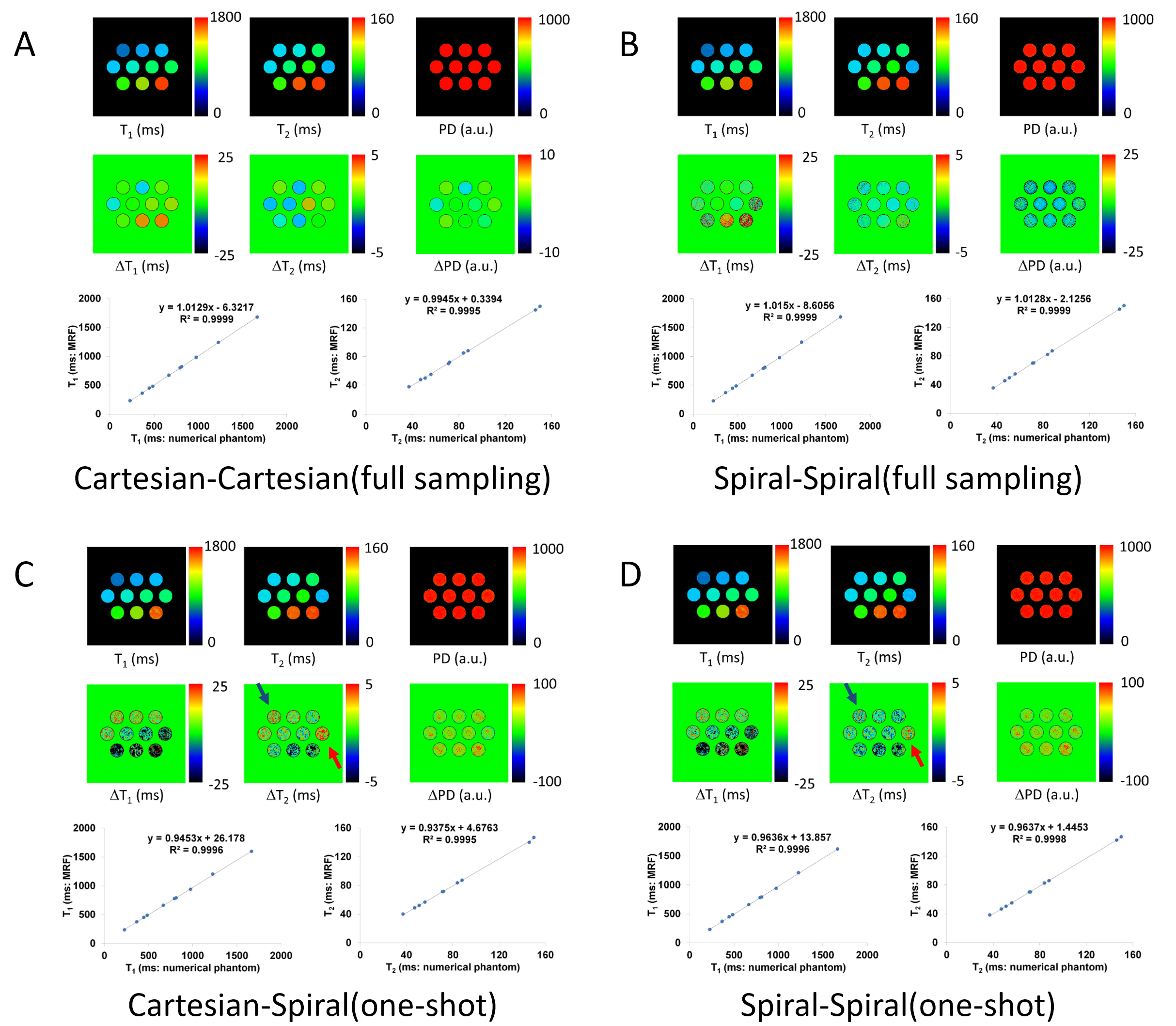
Figures
5 show matching results for the relaxation-time phantom datasets and the two
dictionaries, deviation maps from true values, and correlation plots for T1 and
T2. The Cartesian dictionary was used in A and C and the spiral dictionary was
used in B and D. The Cartesian sampling MRF image dataset and the full
spiral-sampling MRF image dataset were used in A and B. The one-shot
spiral-sampling MRF image dataset was used in C and D. Figure 5A clearly shows
that the deviation in T1 and T2 was caused by the lack of resolution of the
dictionary entries. Figure 5B shows that the deviation in T1 and T2 was caused
by reconstruction noise as well as the lack of the resolution. In Figures
5C-5D, the deviation in T1 and T2 were mostly caused by the reconstruction
noise but the matching result for 5D was better than that for 5C, which demonstrated
the shorter T2 effect on the spiral trajectory.
Discussion and Conclusion
Bloch image simulation for a FISP-based MRF sequence clarified a difference between trajectories used for the data-acquisition.
In conclusion, Bloch image simulations successfully reproduced the MRF process and the proposed method is a simple and accurate method for dictionary generation in MRF.
Acknowledgements
No acknowledgement found.References
[1] Ma D, Gulani V, Seiberlich N, Liu K, Sunshine JL, Duerk JL, Griswold MA. Magnetic Resonance Fingerprinting. Nature 2013;495:187–192.
[2] Weigel M. Extended phase graphs: Dephasing, RF pulses, and echoes - pure and simple. J. Magn. Reson. Imaging. 2015;41:266-295.
[3] Jiang Y, Ma D, Seiberlich N, Gulani V, Griswold MA. MR fingerprinting using fast imaging with steady state precession (FISP) with spiral readout. Magn Reson Med 2015;74:1621–1631.
[4] Kose R, Kose K. BlochSolver: A GPU-optimized fast 3D MRI simulator for experimentally compatible pulse sequences. J Magn Reson 2017;281:51-65.
[5] Kose R, Setoi A, Kose K. A fast GPU-optimized 3D MRI simulator for arbitrary k-space sampling. Magn Reson Med Sci, accepted for publication, September 9th, 2018.
Figures