4520
Regularization of Digitally Integrated, Inductive k-Space Trajectory Measures1Danish Research Centre for Magnetic Resonance, Hvidovre, Denmark, 2Sino-Danish Center for Education and Research, Aarhus, Denmark, 3Philips Healthcare, København SV, Denmark, 4Denmark, 5Chinese Academy of Sciences, State Key Laboratory of Brain and Cognitive Sciences, Institute of Biophysics, Beijing, China, 6University of Chinese Academy of Sciences, Sino-Danish College, Beijing, China, 7Department of Electrical Engineering, Technical University of Denmark, Center for Magnetic Resonance, Kgs Lyngby, Denmark, 8Centre for Functional and Diagnostic Imaging and Research, Copenhagen University Hospital, Danish Research Centre for Magnetic Resonance, Hvidovre, Denmark
Synopsis
Determining k-space trajectories inductively is conceptually simple, but rely on integration of the induced signal. Performing this integration digitally allow for higher degree of flexibility than analog integration, which is necessary to account for, e.g., refocusing RF pulses. Digital integration, however, require high bandwidth sampling of the induced signal as digitization error accumulate, making the overall approach less attractive. We show that the necessary bandwidth can be reduced by performing regularization using a gradient coil current measure.
Introduction
Detailed knowledge of applied gradients is necessary for correct localization of MR samples in k-space, needed for performing artefact-free image reconstruction. Typically, gradient waveforms are indirectly determined by assuming spatial invariance within the field-of-view (FOV) and linear-temporal invariance (LTI) of the hardware generating the gradient field, which may be violated by heating and eddy currents, causing significant errors in the assumed k-space trajectory. For non-Cartesian sampling schemes, such as spiral imaging, k-space trajectory errors are typically not easily accounted for, leading to the need for measuring actual positions of MR data samples in k-space. Multiple approaches exist, and a conceptually simple and practical approach is inductive measurements: A signal induced in a pick-up coil is temporally integrated, which has previously been shown feasible using analog integrators[1]. In comparison, digital integration offers additional flexibility needed for spin-echo sequences, for example, but requires high sampling bandwidth and precision (24-bit sampling @200kS/s[1]) for adequate sampling of the induced voltage. Analog-to-digital converters (ADCs) capable of this are expensive and power-consuming. Although the digitization errors from significantly less expensive 16-bit ADCs lead to small trajectory errors on short time scales (500us), the error accumulates due to the necessary integration, reducing the precision over time. The applied gradient field can alternatively be determined by scaling of a gradient coil current measure[2]. While this approach is insensitive to e.g. eddy currents, making it inaccurate on short time scale, it is accurate on the timescale of typical MR sequence repetition times. Here, we show that a digitally integrated inductive measure and a current-based gradient measure can be combined into a single precise and accurate gradient measure.Methods
The k-space location is given by
$$k_r(t) = \gamma\int_0^t G_r(\tau)\, d\tau$$,
where $$$ k_r(t) = 0$$$ at $$$ t=0$$$, and $$$G_r(t)$$$ is the gradient in direction $$$r$$$. An inductive gradient measure was obtained by placing a pick-up coil (20 windings, Ø3cm) in a gradient field and summing discrete samples of the generated voltage, $$$v_r(t)$$$:
$$G_r^v(t) = \sum_{i=1}^N b_1v_r(\tau_i) \Delta t + c$$.
In this sum over $$$N=(t-t_1)/\Delta t$$$ samples, $$$b_1$$$ is a constant depending on the position and geometry of the pick-up coil, $$$t_1$$$ is the time point of the first sample where $$$\Delta t$$$ is the sampling dwell time, $$$\tau_i = (t_1 + i \Delta t)$$$, and $$$c$$$ is a constant accounting for any gradient applied at $$$t=0$$$. A simple, regularized, inductive measure of the gradient field can then be obtained as
$$G_r^M(t) = \sum_{i=1}^N [b_1 v_r(\tau_1) \Delta t - R(i)]+ c$$,
with a regularization term:
$$R(i) = \eta[G_r^M(\tau_{i-1} - b_2 I(\tau_{i-1}) ]^2$$,
$$$b_2$$$ is a predetermined scaling factor, and $$$\eta$$$ ensures the correct sign of $$$R(i)$$$, so that $$$G_r^M(t)$$$ is relatively slowly pulled towards the current-based gradient measure,$$$b_2 I(t)$$$. A measure of $$$G_r^M(t)$$$ was in near real-time generated by custom open-source circuitry[3] that features ADCs sampling $$$v_r(t)$$$ and $$$I(t)$$$ (16-bit@200kS/s). The gradient measure was used for phase modulation of a carrier signal at the Larmor frequency, which was transmitted to a single receive channel of a 3T Achieva system (Philips, Best, The Netherlands). This allows for determining the k-space trajectory from the accumulated phase of the scanner-acquired signal, while the remaining receive channels concurrently acquire the MR signal.
Results
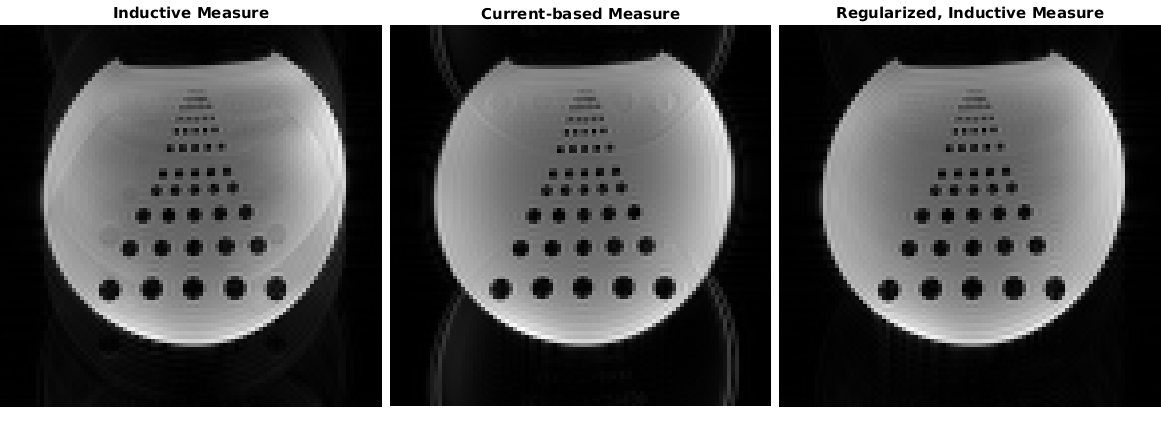
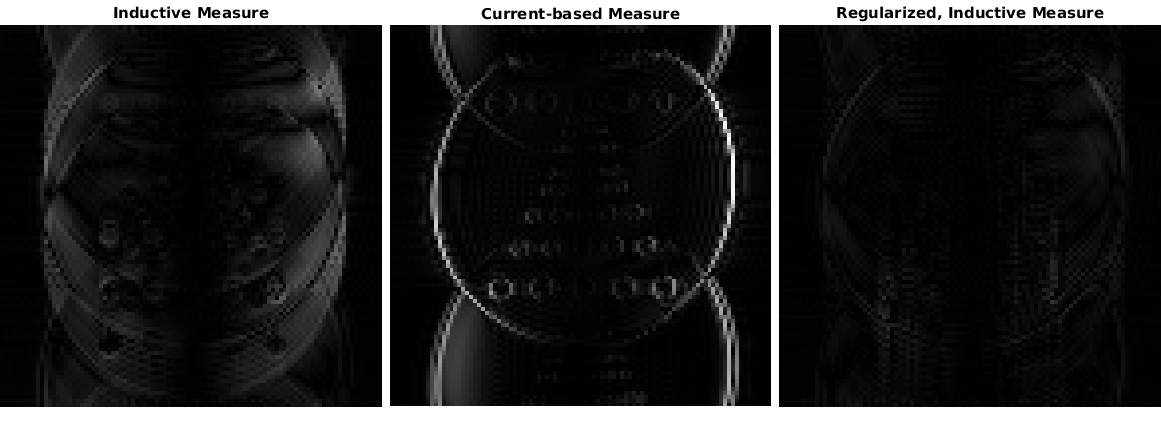
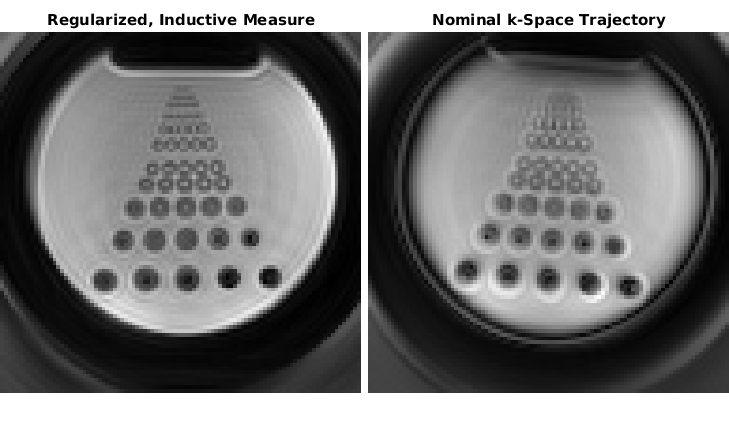
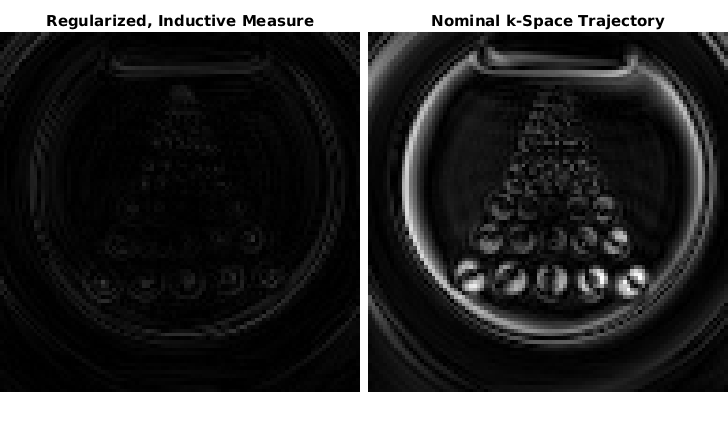
Examples of reconstructed echo-planar imaging data is shown in figure 1. EPI was chosen sincethe well-known ghosting artefact is directly caused by k-space trajectory errors in direction of the readout gradient. An example of reconstructed spiral data is shown in figure 3. Duyn’s method [4] was used to obtain k-space trajectories used as ground truth, and the difference to images reconstructed using this is shown in figure 2 and 4.Discussion
The regularized, inductive k-space trajectory measure outperformed measures that were only inductive or current-based, and yielded reconstructed images without visible artefacts. The method does not rely on a LTI behavior of the gradients (as required by Duyn’s method), as it facilitates concurrent acquisition of MR data and k-space trajectories, as field probes also do. While field probes yield better sensitivity, the presented method is inexpensive, insensitive to field inhomogeneity and is independent of spin history.Conclusion
The presented method is a good candidate for inexpensive and relatively simple real-time determination of k-space trajectories, applicable for debugging and for corrected reconstruction of gradient-demanding and non-Cartesian sequences. In its current implementation, each gradient direction needs to be measured separately, however. The method allows concurrent MRI acquisition, and is applicable to situations that are challenging for other techniques, e.g., for strong $$$B_0$$$ inhomogeneity, or when LTI-behavior of the gradient system cannot be assumed.Acknowledgements
No acknowledgement found.References
[1] Senaj V et al. Inductive measurement of magnetic field gradients for magnetic resonance imaging. Rev. Sci. Instrum., 69(6):2400-2405 (1998)
[2] Spielman DM and Pauly JM. Spiral imaging on a small-bore system at 4.7T. Magn. Reson. Med., 34(4):580-585, (1995)
[3] Pedersen J et al. General purpose electronics for real-time processing and encoding of non-MR data in MR acquisitions. Concepts Magn. Reson. Part B Magn. Reson. Eng, e21385 (2018)
[4] Duyn J et al. Simple Correction Method for k-Space Trajectory Deviations in MRI, J. Magn. Reson., 132, 150-153 (1998)
Figures