4504
Simple and effective trajectory estimation for image reconstruction of accelerated k-space acquisition on non-rectangular periodic trajectoriesKazi Rafiqul Islam1 and Jingxin Zhang1
1School of Software and Electrical Engineering, Swinburne University of Technology, Melbourne, Australia
Synopsis
Precise coordinates of trajectories are essential for image reconstruction of k-space data acquired from non-rectangular trajectories, and measurement of the trajectories often requires prescan calibration that complicates the process. This abstract presents a simple and effective method to estimate the coordinates of non-rectangular periodic trajectories from normal scan data and demonstrates its efficacy in image reconstruction of in vivo scan data acquired from ZIGZAG trajectory.
Introduction
In conjunction with proper image reconstruction methods, K-space data acquisition using non-rectangular periodic trajectories, eg ZIGZAG or sinusoidal wave pattern, can reduce the number of phase encodings and hence accelerate data acquisition. Bunched phase encoding (BPE)1,2 is one of the examples of this kind. For an N x N image M, we can use ZIGZAG or sinusoidal variation of phase direction gradient and oversampling of k-space data during readout to acquire a k-space data matrix of (N/R) x P, where R > 1 is the reduction factor and P/N is the oversampling rate, with P ≥ NR. IFFT2 of the k-space data matrix gives the aliased image D with N/R rows. The image M can be reconstructed by solving a complex valued linear equation D = CM, where C is the aliasing coefficient matrix constructed using the coordinates of the periodic trajectories. The image M can be precisely reconstructed when the coordinates of the physically realized trajectories are the same as the mathematically calculated ones. In practice, however, the physically realized trajectories are never the same as the calculated ones due to gradient imprecision and field inhomogeneity, which results in poor image quality. A fix to this problem is to measure the coordinates of the trajectories and use them to construct C. Such measurements generally requires prescan calibration that complicates the process and increases operation cost. To overcome this difficulty, we present a simple and effective method to estimate the coordinates of non-rectangular periodic trajectories from normal scan data.Method
Fig 1 shows an example ZIGZAG k-space data acquisition, where the red dashed lines are the mathematically calculated trajectory, x’s are the actual data positions. As shown by the black solid line in the figure, in such acquisition, there is actually an underlying rectangular baseline grid, with spacing P, which contains the baseline data points shown by the black x’s. If the image signal of M is band limited, the other data points, shown by the blue x’s, green x’s and red x’s can be regarded as the baseline data, the black x’s, shifted in the x and y directions1. Thus we can use the baseline data points as reference to estimate the x and y direction shifts of other data points. In Fig. 1 example, there are four sets of k-space data: black, blue, green and red. We use the black x’s as reference and use the 2D cross-correlation technique3 to estimate the shifts of other data sets with respect to the black x’s. With the estimated shifts, we can construct the estimated C matrix, Cest, and use D = CestM to reconstruct the image M. This method is developed based on two facts: i) The coefficient matrix C is essentially determined by the shifts of the non-baseline data points with respect to the baseline data points. ii) The 2D cross-correlation technique is an effective and reliable method for estimating the relative shifts of 2D signals. It can be performed by convolution and also by Fourier transform for fast computation.Experiments
Experiments were carried out on 2D in-vivo data from a spin-echo brain scan of a healthy volunteer on Siemens Skyra 3T MRI scanner with 32-channel head coil (FOV: 240 mm, Flip angle:10o, image matrix: 256×256). The k-space data matrix was sampled on ZIGZAG trajectories with the reduction factor R = 2 and the oversampling rate P/N = 8. The trajectory estimation method described above was applied to the k-space data to obtain the coefficient Cest, which is used in D = CestM to reconstruct the image M. For comparison, the image M was also constructed by solving D = CM, where C is constructed using the calculated coordinates of ZIGZAG trajectory.Results
Confer Fig 2Conclusion
We have presented a simple method to estimate the coordinates of non-rectangular periodic trajectories from normal scan data, and have used it to reconstruct a high quality image from ZIGZAG acquired in vivo scan data without prescan calibration. The result shows that the proposed method is effective. The proposed method is applicable to general non-rectangular periodic trajectories and compressed sensing BPE we proposed in 2.Acknowledgements
No acknowledgement found.References
- Moriguchi H, Duerk JL. Bunched phase encoding (BPE): A new fast data acquisition method in MRI. MRM. 2006;55(3):633-48.
- Jingxin Zhang, Kazi Rafiqul Islam, Kai Zhu. Compressed sensing MRI using Bunched Phased Encoding. ISMRM 2017.
- Feng Zhao, Qingming Huang, Wen Gao. Image Matching by Normalized Cross-Correlation. ICASSP 2006.
Figures

Fig 1. Example
ZIGZAG k-space data acquisition. Mathematically
calculated trajectory ---; actual data positions black x’s, blue x’s, green x’s, red x’s,
baseline data points black x’s,
shifted baseline data points blue x’s, green x’s, red x’s.
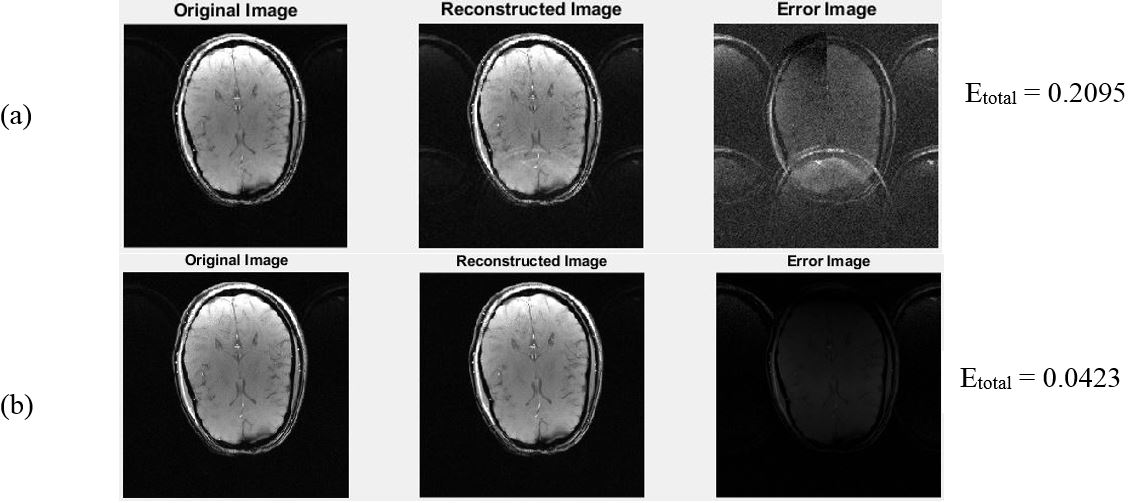
Fig 2. MRI
images reconstructed from ZIGZAG acquired k-space data using (a) calculated
trajectories and (b) estimated trajectories k-space data.