4460
Information Quantification of Subsequent Acquisitions for Minimizing Synthetic MRI Reconstruction Uncertainty1Department of Imaging Physics, The University of Texas M.D. Anderson Cancer Center, Houston, TX, United States
Synopsis
A mutual information-based mathematical framework is developed to quantify the information content of various acquisition parameters and subsampling approaches. A recursive conditional formulation quantifies information content given previous acquisitions. This framework is applied to 3D QALAS. Mutual information between reconstructed M0, T1, and T2 uncertainty and measurement noise is calculated for an in silico phantom and the results applied to measurements on a System Standard Model 130 phantom. Reconstructions from these measurements demonstrate the potential use of information theory in guiding pulse sequence design to maximize reconstruction quality.
Introduction
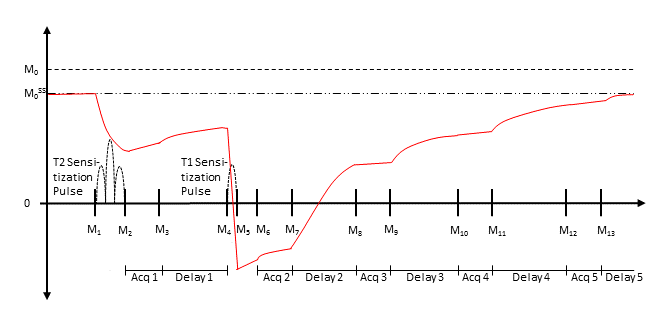
We model an adaptation of 3D QALAS (3D-quantification using an interleaved Look-Locker acquisition sequence with T2 preparation pulse) for 3D multi-parameter quantification in the brain.1 3D QALAS is a novel technique, shown in Fig. 1, which is based on a multi-acquisition 3D gradient echo sequence. The sequence consists of a T2 sensitization phase, during which a gradient echo acquisition is performed after a T2 preparation pulse, and a T1 sensitization phase, during which four gradient echo acquisitions are performed after an inversion pulse. M0, T1, and T2 parametric maps are fitted to these five measurements. The primary drawbacks of quantification methods are scan time and accuracy. Many existing methods require clinically unacceptable scan times, while fast methods typically have a narrow range of accuracy or require high SNR to obtain adequate estimates.2 Information theory provides a method to address these two drawbacks by obtaining a quantitative understanding of the information content of potential acquisitions. Mutual information is a measure of the information gained about the final parametric map reconstruction from an acquisition with specific acquisition and subsampling parameters. A mutual information optimization model allows selection of parameters which maximize synthetic MRI reproducibility for given clinical constraints. Further, conditional mutual information dependent on previous measurements enables updating acquisition parameters in real time to minimize reconstruction uncertainty. In this study, we investigate the feasibility of progressively predicting optimal k-space sampling locations based on k-space data that has already been sampled.Methods
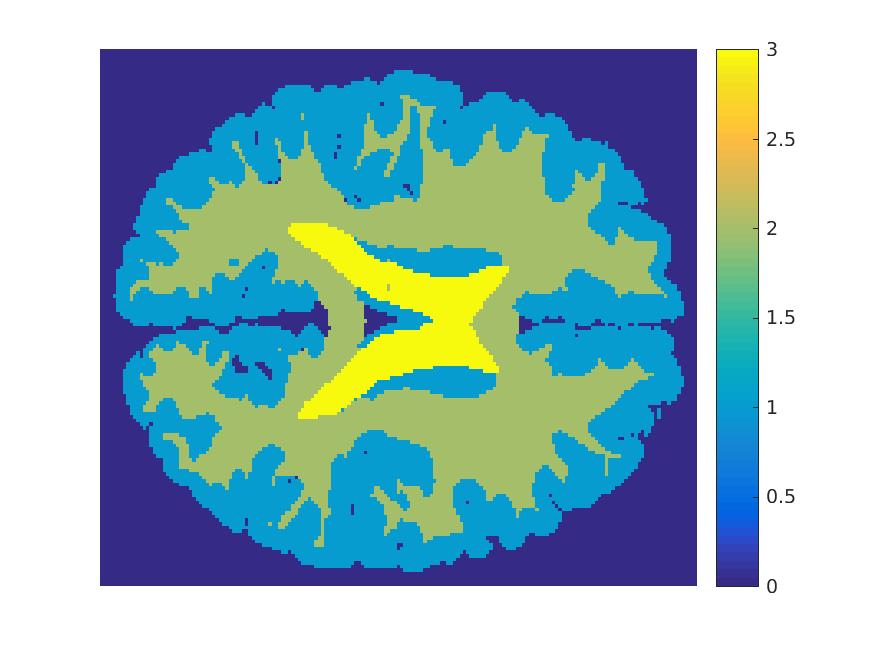
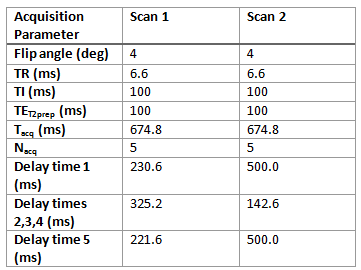
A mathematical model of the 3D QALAS sequence is developed to represent the uncertainty in parametric map reconstruction and machine noise during acquisition. Information theory is used to quantify the information gained in the final reconstructed parametric maps by potential measurements with specific acquisition parameters and subsampling patterns. Specifically, mutual information between measurement noise and reconstructed parametric map uncertainty provides a quantitative method to optimize 3D QALAS acquisition. Mutual information is calculated as a function of acquisition and subsampling parameters using Gauss-Hermite quadrature to compute the required high-dimensional integration. This mathematical framework is extended to recursively compute mutual information of a new set of measurements conditional on any number of previous acquisitions with independent acquisition and subsampling parameters. A representative in silico phantom, pictured in Fig. 2, is used to calculate conditional mutual information and predict an optimal information-guided subsampling pattern. To test acquisition parameter optimization, two scans were performed with the parameters in Fig. 3. Mutual information was calculated for each of the phantom elements individually given the scan parameters and compared to the standard deviation of reconstructed M0, T1, and T2 values within these elements. To test subsampling optimization, an information-guided approach is compared to an empirical approach using measurements acquired on a System Standard Model 130 phantom (QalibreMD, Boulder, CO) with a 3T scanner (MR750, GE Healthcare, Waukesha, WI). Acquisition parameters were as follows: matrix = 224x192, flip angle = 4 degrees, TI = 100 ms, TR = 6.6 ms, acquisition spacing = [0.23 s, 0.325 s, 0.325 s, 0.325 s, 0.22 s]. Mutual information-guided subsampling is performed by iteratively sampling the most informative voxel, conditional on all previously sampled voxels, until 50% of k-space is sampled. Poisson disk sampling of approximately 50% of k-space is performed as a control.Results
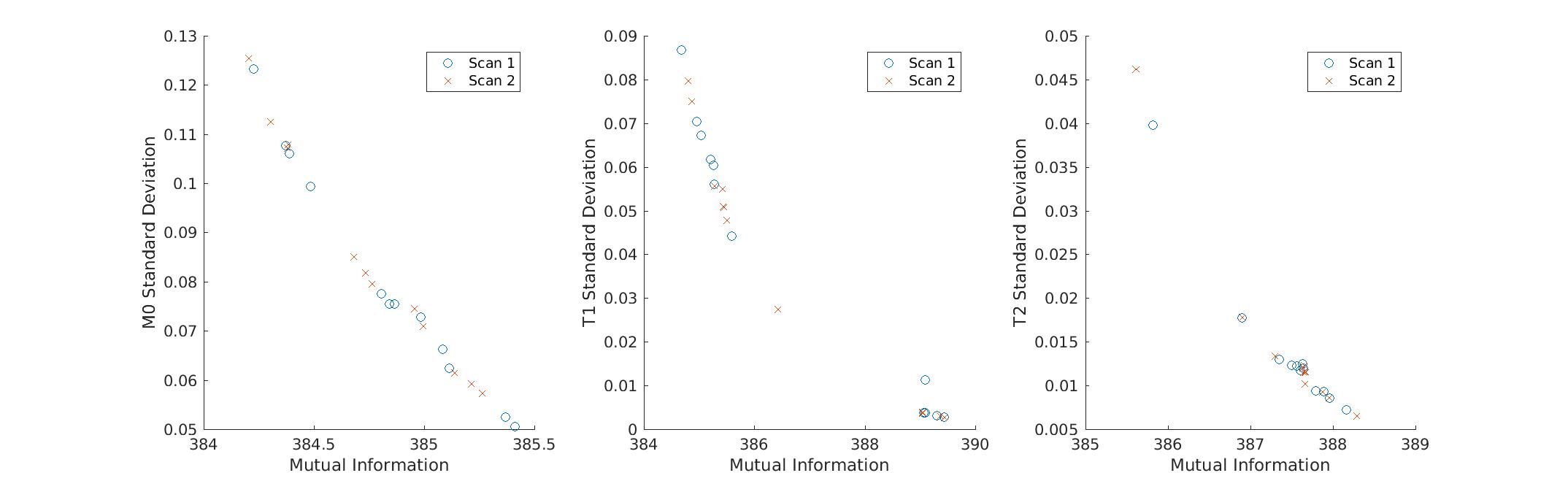
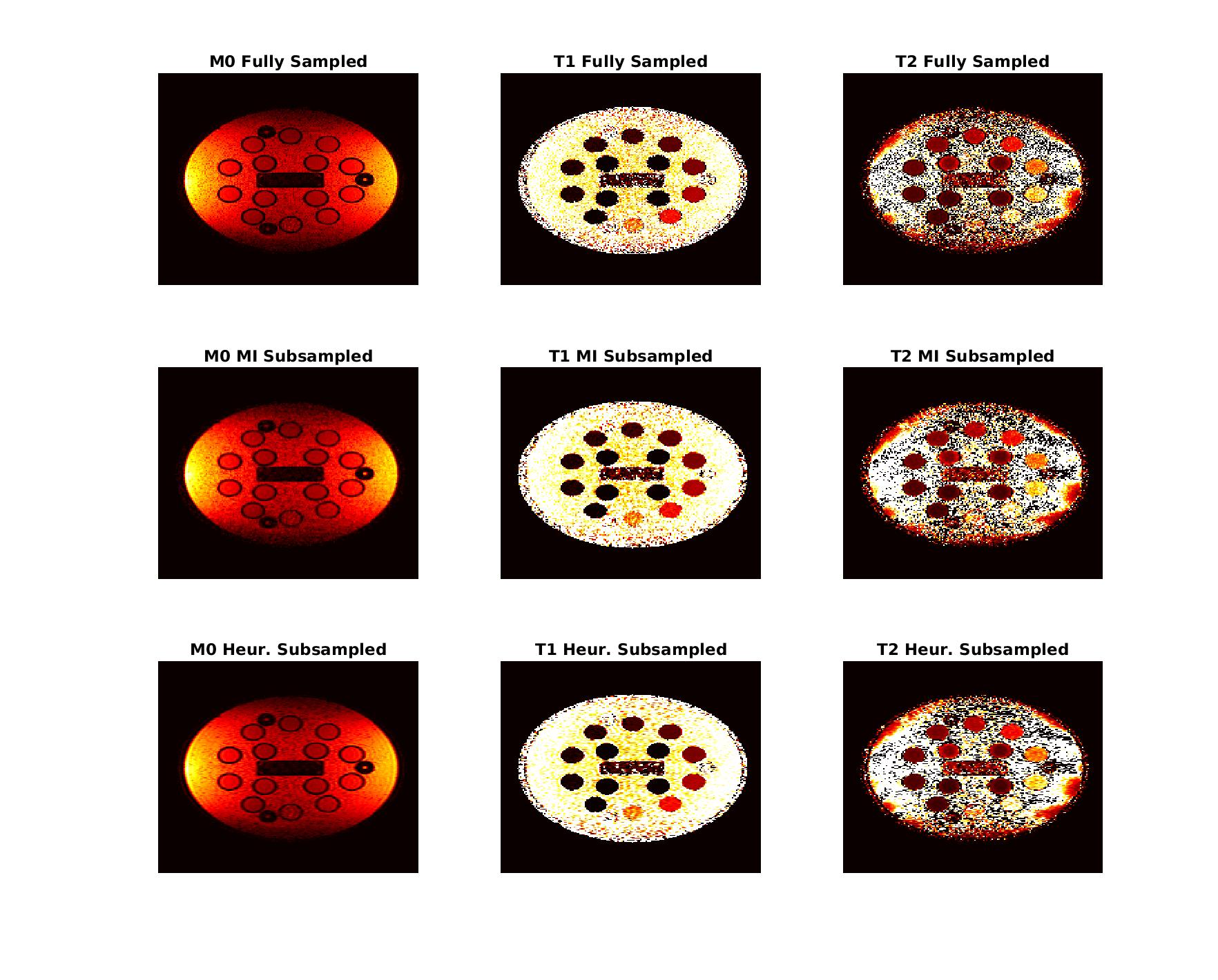
Figure 4 shows reconstruction uncertainty, measured by standard deviation of parametric map values within the phantom elements, as a function of mutual information. Figure 5 shows reconstructed parametric maps for three cases: fully sampled k-space, mutual information-guided subsampling of k-space with acceleration of 2, and Poisson disk subsampled k-space with acceleration of 2.Discussion
The relationship between the distributions of reconstructed M0, T1, and T2 values and mutual information shown in Fig. 4 demonstrates that these distributions reliably become narrower for greater mutual information. Conditional mutual information is thus a feasible metric to minimize reconstruction uncertainty. The mutual information-guided subsampling reconstructions in Fig. 5 show slightly less blurring than the Poisson disk sampled reconstructions. However, the most significant improvements are likely to be found from guiding real time updates of both acquisition and subsampling parameters between individual acquisitions.Conclusion
This information theoretic analysis enables quantitative guidance of synthetic MRI acquisitions across multiple applications. It is a novel quantitative understanding of parametric map reconstruction uncertainty in terms of acquisition and subsampling parameters, which is currently understood only empirically. Further, this quantitative optimization has potential applications in corrective updates to acquisitions. Real time updates could range in complexity from updating locations of new measurements in undersampled acquisitions to altering pulse sequence parameters mid-scan to maximize information acquired within clinical constraints.Acknowledgements
Research support was provided in part by GE Healthcare.References
1. Kvernby, S., Warntjes, M. J., Haraldsson, H., Carlhall, C. J., Engvall, J., & Ebbers, T. (2014). Simultaneous three-dimensional myocardial T1 and T2 mapping in one breath hold with 3D-QALAS. J Cardiovasc Magn Reson, 16, 102. http://doi.org/10.1186/s12968-014-0102-0
2. Odrobina, E. E., Lam, T. Y. J., Pun, T., Midha, R., & Stanisz, G. J. (2005). MR properties of excised neural tissue following experimentally induced demyelination. NMR in Biomedicine, 18(5), 277–284. https://doi.org/10.1002/nbm.951
3. Zhang, T., Pauly, J. M., & Levesque, I. R. (2015). Accelerating parameter mapping with a locally low rank constraint. Magnetic Resonance in Medicine, 73(2), 655–661. http://doi.org/10.1002/mrm.25161
Figures