4448
Deep learning based motion estimation from highly under-sampled EPI volumetric navigators1Monash Biomedical Imaging, Monash University, Melbourne, Australia, 2Department of Material Sciences and New Technologies, Vasyl Stefanyk Precarpathian National University, Ivano-Frankivsk, Ukraine, 3School of Psychological Sciences, Monash University, Melbourne, Australia, 4Department of Electrical and Computer System Engineering, Monash University, Melbourne, Australia
Synopsis
Dynamic EPI volumetric navigators are widely used to track head motion in MRI, and accurate motion estimation requires EPI volumes to be inserted in every several seconds or even less. However, the use of dynamic EPI volumes to track motion significantly degrades the overall data acquisition efficiency. To address this issue, in this work we introduce a deep learning based motion estimation method from highly under-sampled (i.e. acceleration factor of 16) EPI volumetric navigators. The method directly estimates motion parameters from the under-sampled data, and does not require reconstruction of images.
Introduction
Head motion is a one of major issue in MRI. EPI volumetric navigators are often used to track and correct motion artifacts1. To achieve high temporal resolution for motion estimation, the EPI volumes are required to be inserted in every several seconds or even sub-seconds within the anatomical MRI sequences1,2. Accurate motion estimation relies heavily on high quality of EPI images for robust image co-registration however, the use of dynamic EPI volumes to track motion significantly degrades the overall data acquisition efficiency. Parallel imaging or compressed sensing can be used to accelerate data acquisition. In parallel imaging or compressed sensing, high quality image reconstruction for highly under-sampled datasets remains a challenge due to the nature of inverse problem. In this work, we introduce a method, using Deep Learning (DL), to directly estimate motion parameters from highly under-sampled (i.e. factor of 16) EPI volumes. The DL model is trained on motion corrupted images generated by modulating real motion parameters on dynamic EPI volumes, and evaluating them against the ground-truth motion information.Methods
Generation of motion datasets:
We model the subject’s head movements as a sequence of affine transformation (i.e. 6 degree of freedom (DoF)) that occur between the dynamic EPI volumes.
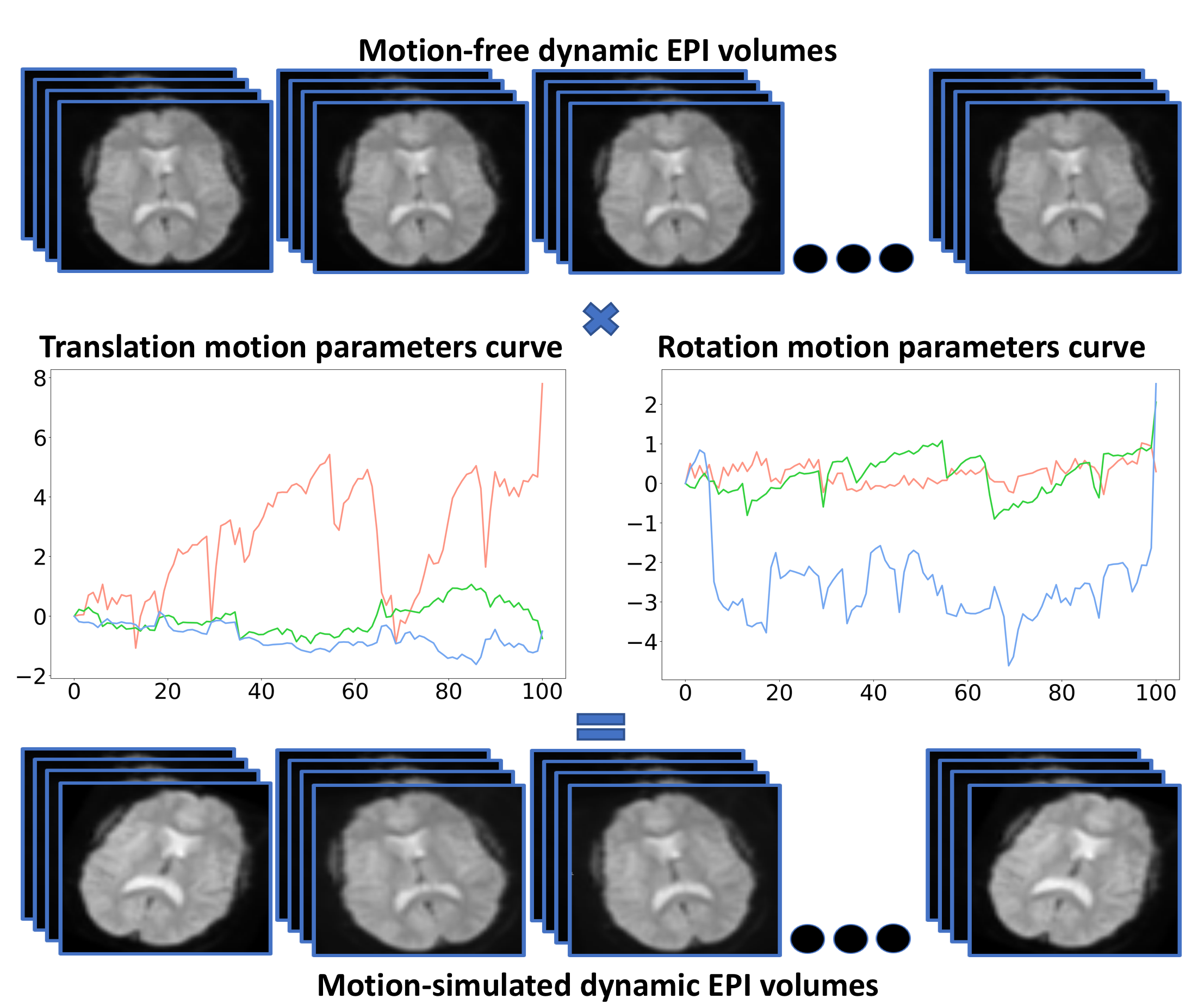
For simulating head movements, we used a dataset of ten subjects, each acquired with a 40 minutes scan with tracked movements as translational and rotational motion information. The motion data was then augmented by (i) manipulating the initial motion parameters with linear combinations, periodical and exponential transforming and adding noise; (ii) under-sampling (under-sampling factor = 16) the 3D dynamic EPI dataset of the ten subjects (242 frames per each volume with dimensions 64x64x44) time series with resolution of 1 mm isotropic; (iii) applying 6 DoF transformation to the undersampled data for each pair (EPI volume – motion parameter) in image space. This resulted in an undersampled motion-corrupted fMRI dataset with 242 frames per volume as the training data for the neural network. The simulation of motion datasets is described in Figure 1.
Network Training:
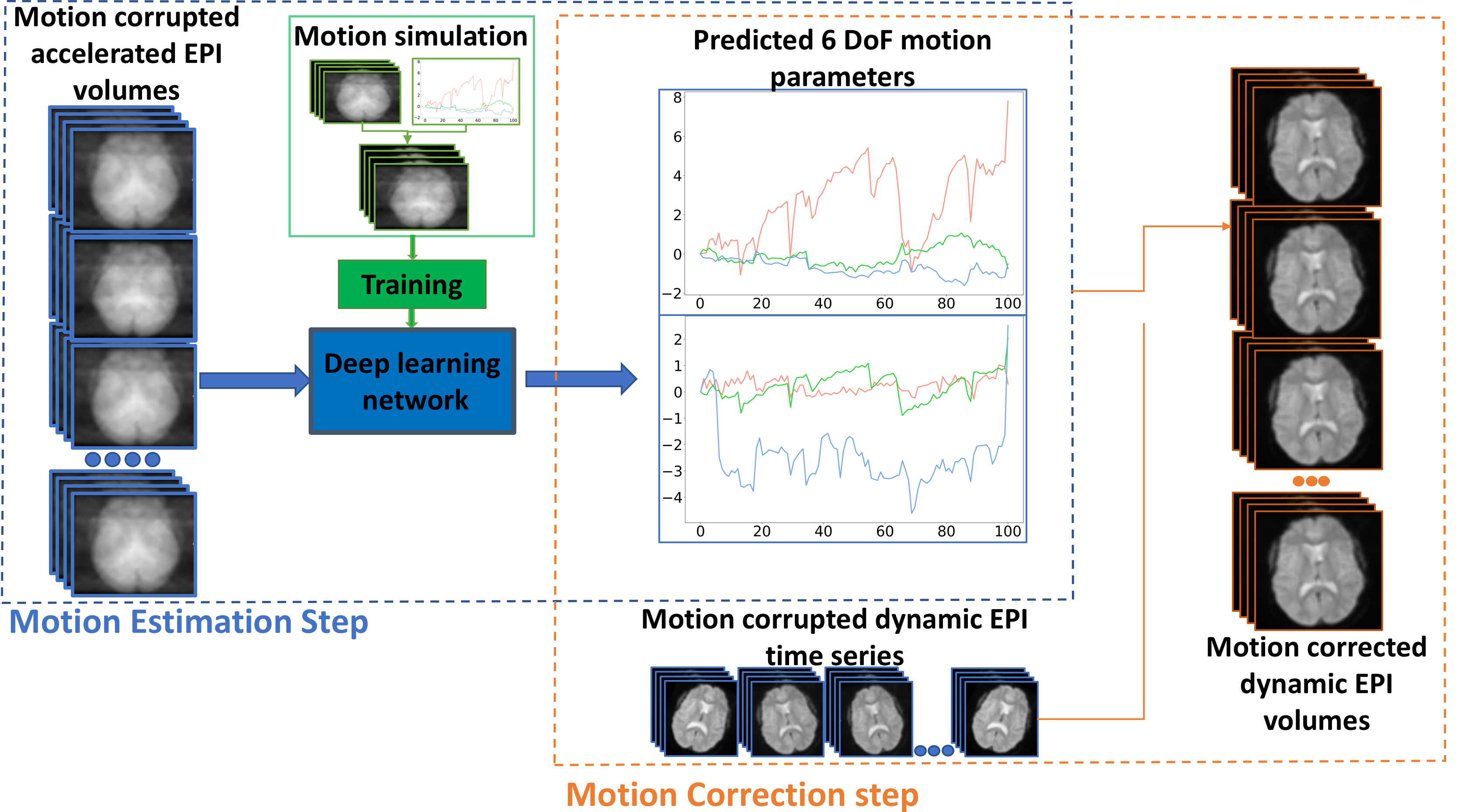
To Estimate the 6 DoF motion parameter we have designed and trained encoder-decoder convolutional neural network (CNN) based on U-Net architecture3, with three stages, each of which consists of 3D convolution, max-pooling and Leaky Relu Activation. The dense layer was applied after these three stages for direct motion parameters prediction. As the optimizer the “Adam” with learning rate = 0.0001, epoch = 100, batch size = 1, 5000 iterations per epoch was used. The lost function was determined by mean absolute error. The hardware used for training was Nvidia V100 GPU.
The pair of motion-clear and motion-simulated images was used as input to the network. The output of the CNN is the 6-dimensional vector representing 6DoF motion which was used for the simulation. The overall workflow of the proposed method is shown in Figure 2.
Results and Discussion
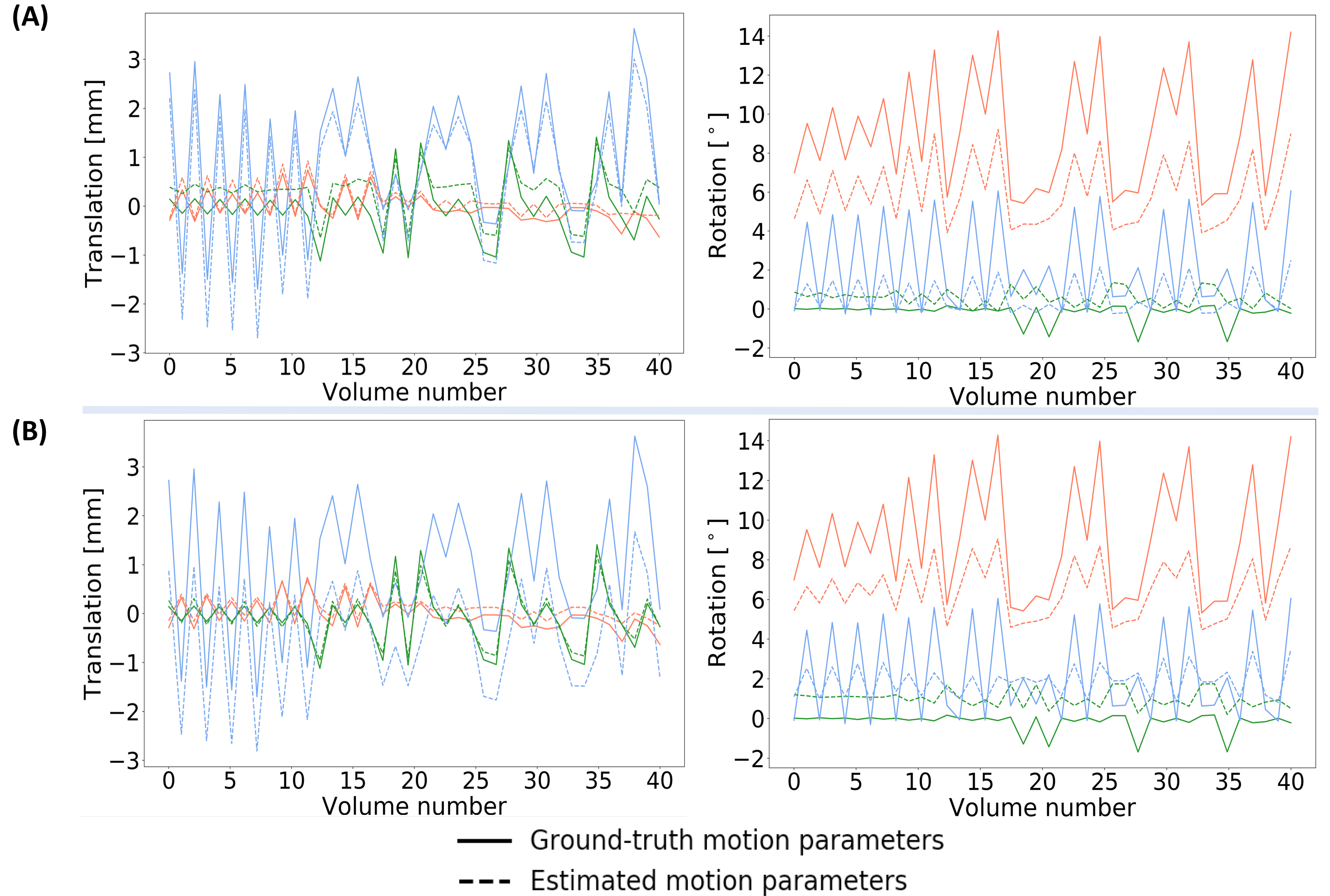
Figure 3 shows the neural network accurately estimates the translation motion parameters for both the fully sampled and under-sampled datasets. There are around two degrees of offsets in the rotational parameter estimation likely due to insufficient training, however both motion trends are effectively predicted. The network performance is similar when compared with the fully under-sampled datasets which indicates the effectiveness of the proposed method in estimation of motion for highly under-sampled datasets.
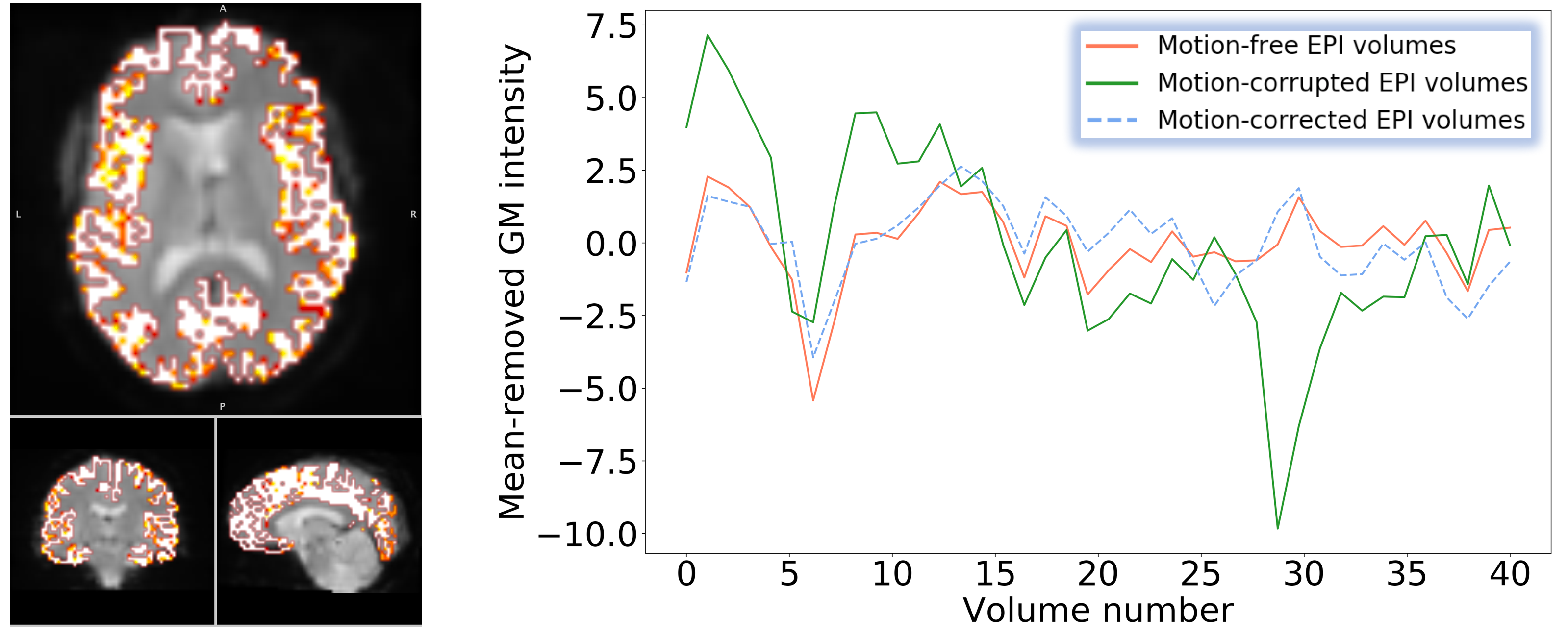
The mean removed Grey Matter (GM) intensity plots are reported in Figure 4. Compared with the GM values from the motion corrupted images, the motion corrected images demonstrate the substantial recovery of actual GM intensity.
Conclusion
We have presented a new deep learning approach to directly estimate motion parameters from dynamic EPI volumes. The proposed method mitigates the need for image reconstruction from highly under-sampled datasets. The advantage of the proposed method has been demonstrated using a simulated motion experiment using both fully sampled and under-sampled (e.g. factor of 16) EPI datasets. The performance of the proposed method is nearly identical between the fully sampled and under-sampled datasets.Acknowledgements
No acknowledgement found.References
1. Tisdall M D, Hess A T, Reuter M, Meintjes E M, Fischl B, van der Kouwe A J. Volumetric navigators for prospective motion correction and selective reacquisition in neuroanatomical MR. Magn Reson Med. 2012; 68:389–99. doi: 10.1002/mrm.23228.
2. F Godenschweger, U Kägebein D Stucht, U Yarach, A Sciarra, R Yakupov, F Lüsebrink, P Schulze and O Speck. Motion correction in MRI of the brain. Physics in Medicine and Biology. 2016;61(5) : R32-56.
3. Ronneberger O, Fischer P, Brox T. U-net: Convolutional networks for biomedical image segmentation. International Conference on Medical Image Computing and Computer-Assisted Intervention 2015 Oct 5 (pp. 234-241). Springer, Cham.
Figures