4442
Translational Motion Compensation for 3D FSE Parallel Imaging using Autocalibration Signals1Department of Medical Informatics, Erasmus MC, Rotterdam, Netherlands, 2Department of Radiology and Nuclear Medicine, Erasmus MC, Rotterdam, Netherlands
Synopsis
Motion during scanning deteriorates MR image quality, especially in 3D fast spin echo (FSE) acquisitions which typically require long acquisition time, even with parallel imaging. Instead of prospective motion compensation which is often difficult to perform, we propose a retrospective translational motion compensation method using autocalibration signals. The proposed method estimates the motion by minimizing the GRAPPA prediction error of the motion corrected signal in the autocalibration signal region. In-vivo experimental results demonstrate the effectiveness of our method.
Introduction
Motion during the acquisition is one major source of artifacts in MRI. Fast spin echo (FSE) and parallel imaging are commonly used to reduce the acquisition time, though, 3D acquisitions can still require long times, and hence are vulnerable to motion. Prospective motion compensation is often not available or difficult to use. Therefore, we propose a retrospective translational motion compensation method for 3D FSE parallel imaging using the fully sampled autocalibration signal (ACS) region.Methods
Parallel imaging is performed with a multi-channel coil. GRAPPA uses the fact that the k-space signals are locally linearly correlated among all channels. Therefore, the signal can be derived from its neighborhood as [1]
$${\hat S_c}(\textbf k) = \sum\limits_{c', \textbf{b}} {n_c}(c', \textbf{b}) {S_{c'}}(\textbf{k} - \textbf{b} ) ,~ (1)$$
where $$$\textbf{k}$$$ is the 3D k-space location vector of the k-space signal in first phase encoding (PE1), second phase encoding (PE2), and frequency encoding (FE) directions, $$$n_c$$$ is the GRAPPA kernel of channel $$$c$$$ estimated in the ACS region. $$$\textbf{b}$$$ specifies the offset vector to neighboring points used in the estimation of position $$$\textbf{k}$$$.
However, motion among neighboring signals can reduce this local correlation, causing suboptimal signal prediction. Turning this around, the motion can be estimated by minimizing the difference of the motion corrected signal and the prediction based on it:
$${\hat{\bf{\Delta }}},{\hat n_c} = \mathop {\arg \min }\limits_{{\bf{\Delta }},{n_c}} \sum\limits_{\textbf{k}} {{{\left\| {{{\tilde S}_c}(\textbf{k},\mathop {\Delta (\textbf{k})} ) - \sum\limits_{c', \textbf{b} } {{n_c}(c', \textbf{b})} {{\tilde S}_{c'}}(\textbf{k} - \textbf{b},\mathop {\Delta (\textbf{k})})} \right\|}^2}} + \lambda \sum\limits_c {\left\| {{n_c}} \right\|_2^2} + \phi \left\| {\mathop {\bf{\Delta}}\limits^{} } \right\|_2^2,~ (2)$$
where $$$\Delta (\textbf{k})$$$ is the motion vector of the signal $$$\textbf{k}$$$, $$$\bf{\Delta}$$$ is the collection of $$$\Delta (\textbf{k}) ~ \forall \textbf{k}$$$, $$$\lambda$$$ and $$$\phi$$$ are the regularization parameters for $$$n_c$$$ and $$$\bf{\Delta}$$$ respectively, and
$${\tilde S}_{c}(\textbf{k},\Delta) = {S}_{c}(\textbf{k})exp(2\pi i \textbf{k} {\Delta}^T),~ (3) $$
where we assumed translational motion. We solve the optimization in Eq. (2) using block coordinate descent, alternating between optimization of $$$\bf{\Delta}$$$ using Matlab’s nonlinear least-squares solver lsqnonlin and estimating $$$n_c$$$ by the regular GRAPPA kernel estimation procedure.
To maintain a good local linear correlation in a correctly motion compensated k-space, we assume that the subject remains inside the FOV throughout the acquisition. In an FSE acquisition, the time of an echo train (ET) is substantially shorter than TR and is typically on a magnitude of hundreds of milliseconds, therefore we assume no motion occurs within one ET. Additionally, we assume that each ET has several echoes included in the ACS region, so that by optimizing Eq. (2) we obtain the estimated $$$\bf{\Delta}$$$ for every ET. Subsequently this $$$\bf{\Delta}$$$ is applied to the entire k-space. Since signals are fully sampled in the ACS region, the $$$5\times5$$$ neighborhood in the PE directions are fully used for autocalibration.
Experiments
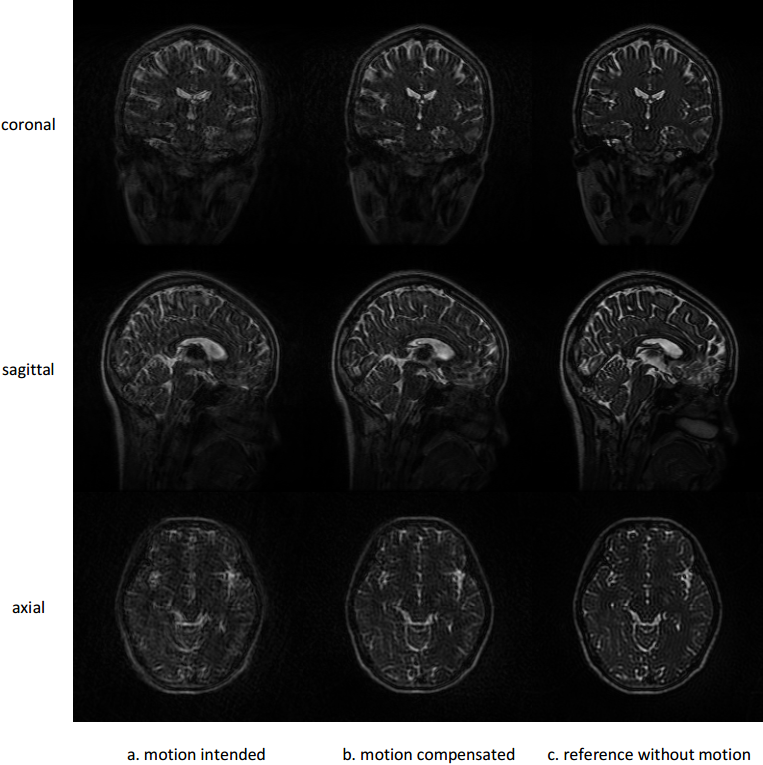
Two T2 weighted in-vivo brain parallel imaging acquisitions were performed using the variable flip angle Fast Spin Echo (FSE) [2] sequence on a 3T GE (MR750) scanner with an 8-channel brain coil, one with intentional motion and another without as reference. In the motion intended acquisition, the volunteer was expected to create around 1 cm translational motion in one/two PE directions at every 10 shots. The settings: $$$TR/ESP/ETL=2000ms/4.688ms/120$$$ with fast recovery. Only the last 60 echoes of each ET were placed into the k-space. $$$BW/pixel=41.67kHz$$$, $$$FOV=240\times240\times240mm^3$$$, and $$$matrix=120\times120\times256$$$ in PE1, PE2, and FE directions. A CAIPIRINHA [3] like k-space pattern with subsampling factor of $$$2\times2$$$ in two PE directions with a $$$25\times25$$$ ACS region was used with a Radial trajectory [4] with k-space corners skipped. The scan time for each acquisition was 1.84 min.
The non-motion intended acquisition was reconstructed by GRAPPA as the reference. The motion intended acquisition and its motion compensated one were also reconstructed by GRAPPA for comparison.
Results and Discussion
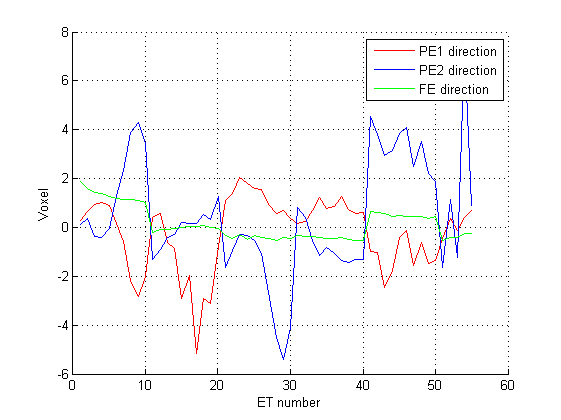
The center slice of the reconstructed images of the motion intended acquisition, the motion compensated acquisition, and the no-motion intended reference acquisition are shown in coronal, sagittal, and axial planes in Figure 1. The optimized motion vectors of all ETs are shown in Figure 2. As shown in the images in Figure 1, the motion artifacts were reduced substantially by the proposed method. From the optimized motion vector in Figure 2, with the voxel size of $$$2\times2\times0.94mm^3$$$, motions with roughly 1 cm magnitude at every 10 shots can be observed.Conclusion
With the assumption of no motion within a single ET, and the subject always inside the FOV, our proposed method can compensate substantial translational motion during the variable flip angle FSE acquisition with radial view ordering.Acknowledgements
No acknowledgement found.References
1. Griswold M A, Jakob P M, Heidemann R M, et al. Generalized autocalibrating partially parallel acquisitions (GRAPPA). Magnetic resonance in medicine, 2002; 47(6): 1202-1210.
2. Busse R F, Hariharan H, Vu A, et al. Fast spin echo sequences with very long echo trains: design of variable refocusing flip angle schedules and generation of clinical T2 contrast[J]. Magnetic Resonance in Medicine, 2006, 55(5): 1030-1037.
3. Breuer F A, Blaimer M, Mueller M F, et al. Controlled aliasing in volumetric parallel imaging (2D CAIPIRINHA)[J]. Magnetic Resonance in Medicine, 2006, 55(3): 549-556.
4. Busse R F, Brau A, Vu A, et al. Effects of refocusing flip angle modulation and view ordering in 3D fast spin echo[J]. Magnetic Resonance in Medicine, 2008, 60(3): 640-649.
Figures