3849
MINIMA – Minimally invasive, image guided ablation using MRI1Centre for Advanced Biomedical Imaging, UCL, London, United Kingdom, 2Davy-Faraday Research laboratories, UCL, London, United Kingdom
Synopsis
Minimally invasive, focal therapies aim to deliver more effective treatment to the patient while reducing off target effects. As such, we have developed MINIMA, a minimally invasive, image-guided ablation MRI technique, whereby a magnetic thermoseed can be manoeuvred through tissue, localised with real time imaging and then heated to cause cell death. We demonstrate submillimetre precision of movement through ex vivo brain tissue and that the seed can be heated via application of radiowaves to cause well defined regions of cell death. These results show that MINIMA is a promising new technique that could help transform MRI into a brand new theranostic device.
Introduction
At present there is a drive to develop novel minimally invasive focal therapies designed to deliver more effective treatment while reducing off target effects1. This study demonstrates the proof of concept of MINIMA, a minimally invasive, image-guided ablation technique using MRI. A magnetic thermoseed can be implanted superficially and guided towards the target site using the magnetic field gradients of an MRI scanner. In this work we show that not only can the seed be moved through ex vivo brain tissue, but its movement can be tightly controlled to deliver submillimetre precision. The seed is then heated using radiowaves to cause localised cell death.Methods
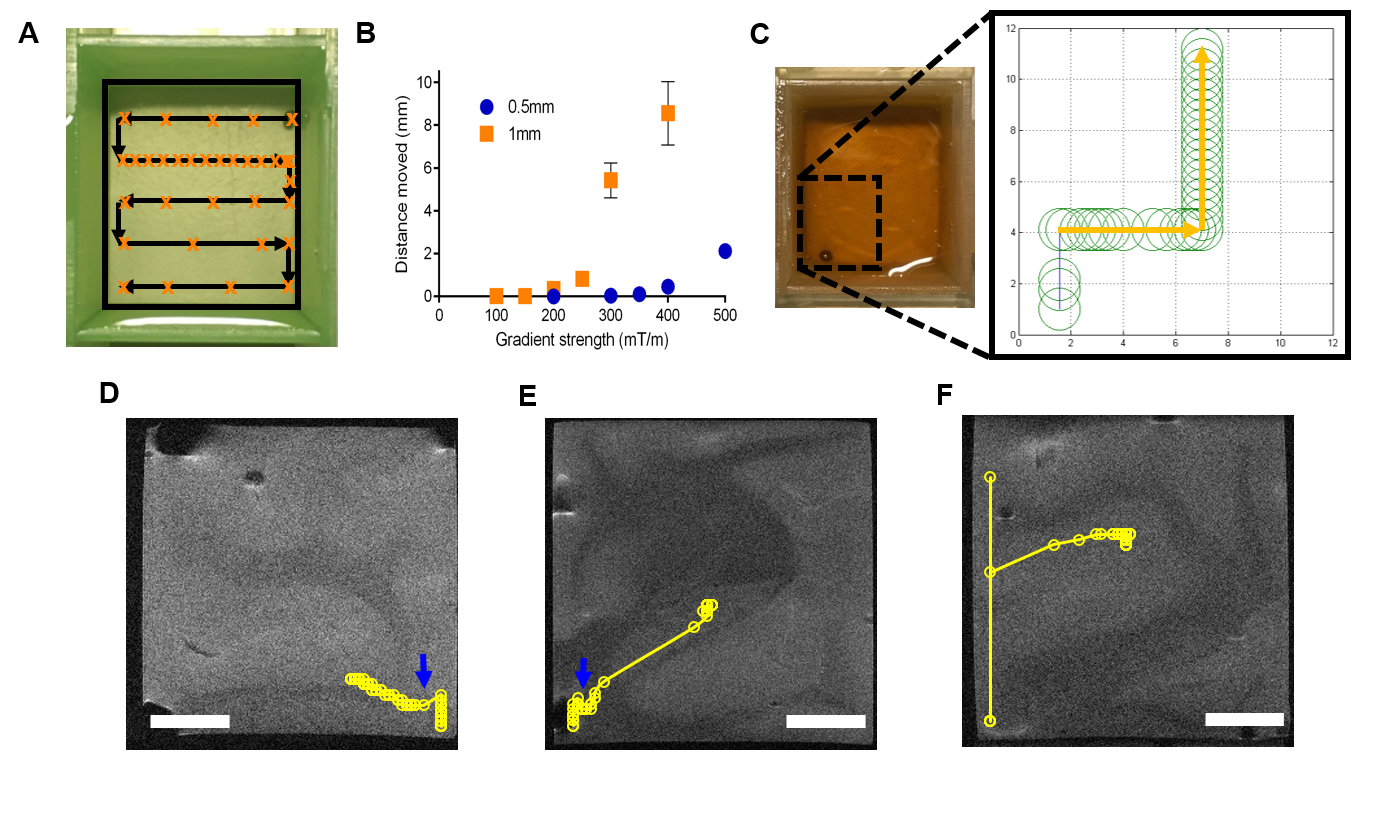
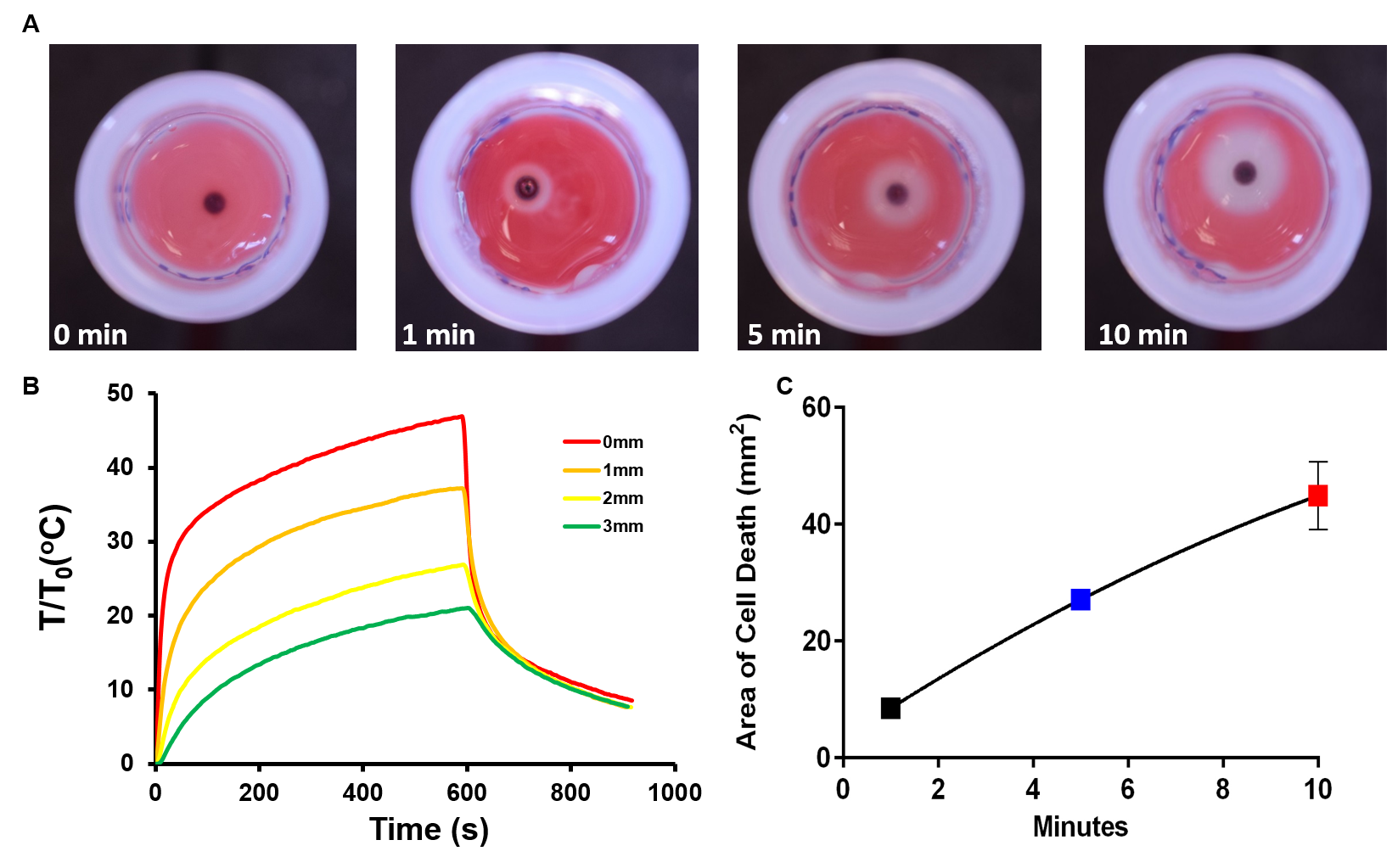
Experimental data were acquired on a 9.4T Varian scanner. Chrome steel spheres (aisi 52100) 0.5 -2 mm diameter were placed in a 22x25x25mm phantom filled with either 0.125% agar, viscous media or ex vivo brain tissue. In viscous media, the relative movement of the 2mm seed was measured by convolving two 1D projections at 30000Hz off resonance (FOV = 50x35mm, data matrix = 128x128, slice thickness = 30mm, Bandwidth = 1994kHz, TR = 0.5s, TE = 13.8ms) similar to existing work2. Relative movement in ex vivo brain tissue was measured by finding the first (or last) point along the 1D projection where signal reaches half maximum. This was overlaid onto 3D FSEMS images (data matrix = 256x256, slices = 20, slice thickness = 1mm, TR = 1s, TE = 20ms) of the brain tissue. Parameters for the propulsion gradients were: gradient strength = 100-500mT/m, loops = 500 – 4000, duty cycle = 2/7ms (agar and viscous medium) and 20/70ms (ex vivo brain). Brain tissue was heated to 37oC. To investigate cell death via heating a 2mm seed was placed into a 7.5mm2 x 4mm 3D cell culture. An external coil was used to apply radiowaves at 895kHz and 6kA/m to heat the seed for 1, 5 and 10 minutes. Immediately after heating cells were stained with TTC and incubated for 1 hour.Results
We observed controlled movement of the magnetic seed in an agar phantom (Fig. 1A-B). The accuracy increased at smaller distances with an error of 0.2mm at 250mT/m compared to ±1.47mm at 400mT/m for a 1mm seed. Using a purely viscous media, the seed moved exactly in line with force direction and was readily guided along a predetermined path, delivering consistent distances when the same forces were applied (Fig. 1C). Again, we were able to move the seed through brain tissue. The direction and distance moved within ex vivo brain was effected by gradient strength and to some degree the different tissue structures. Smallest detectable movements of 0.39 and 0.27 mm in the readout and phase encoding directions were possible (Fig. 1D-F). A clear perimeter of cell death was observed when the seed was heated. Average areas of 8.5±0.39 mm2, 27.1±0.86 mm2 and 44.9±3.35 mm2 were calculated after 1, 5 and 10 minutes respectively.Discussion
Our results show that a magnetic thermoseed can be manoeuvred through brain tissue with submillimetre precision using a preclinical MRI scanner. Previously studies have suggested that the gradient strengths generated by MRI scanners are insufficient to produce enough force for tissue penetration3,4. However it has been shown that a steel sphere can be guided through a swine artery using real-time feedback5. We show that not only is movement possible through ex vivo brain tissue, but its position can be accurately guided towards a target destination. The influence of different tissue structures on the movement of the seed emphasises the need for imaging to both plan an optimum path and to monitor the seeds location in real time. Once the seed has reached the target site we have shown that a clear region of cell death occurs after heating which can be controlled by varying the duration of heat application.Conclusion
This study shows that a millimetre sized magnetic thermoseed can be moved through ex vivo brain tissue with submillimetre precision and generate localised, controllable cell death via heating. This is the first step in developing MINIMA, a minimally invasive, image-guided ablation technique which looks to transform MRI into a combined diagnostic and therapeutic tool to create a brand new theranostic device.Acknowledgements
This work is supported by the EPSRC-funded UCL Centre for Doctoral Training in Medical Imaging (EP/L016478/1)References
1. Valerio, M. et al. New and Established Technology in Focal Ablation of the Prostate: A Systematic Review. Eur. Urol. 71, 17–34 (2017).
2. Aboussouan, E. & Martel, S. High-Precision Absolute Positioning of Medical Instruments in MRI Systems. in 2006 International Conference of the IEEE Engineering in Medicine and Biology Society 743–746 (2006). doi:10.1109/IEMBS.2006.259265
3. Becker, A. T., Felfoul, O. & Dupont, P. E. Toward tissue penetration by MRI-powered millirobots using a self-assembled Gauss gun. in 2015 IEEE International Conference on Robotics and Automation (ICRA) 1184–1189 (2015). doi:10.1109/ICRA.2015.7139341
4. Leclerc, J., Ramakrishnan, A., Tsekos, N. V. & Becker, A. T. Magnetic Hammer Actuation for Tissue Penetration Using a Millirobot. IEEE Robot. Autom. Lett. 3, 403–410 (2018).
5. Martel, S. et al. Automatic navigation of an untethered device in the artery of a living animal using a conventional clinical magnetic resonance imaging system. Appl. Phys. Lett. 90, 114105 (2007).
Figures