3842
A Machine Learning Based Biomechanical Model for Real-time MR-guided Neuro-intervention1Biomedeical Engineering, Shanghai Jiaotong University, Shanghai, China, 2KTH Royal Institute of Technology, Stockholm, Sweden, 3Functional Neurosurgery, Shanghai Jiaotong University, Shanghai, China, 4Electrical and Computer Engineering, University of Illinois at Urbana-Champaign, Urbana, IL, United States
Synopsis
Magnetic resonance (MR) guided neuro interventions could be combined with robotic assisted manipulation to achieve optimal performance. Patient specific model constructed from MR images of the brain could have the best biophysical fidelity but suffers from high computational cost. For real-time applications, we proposed to construct an Artificial Neural Network (ANN) based on the training from computational outputs of Finite element Analysis (FEA). Results demonstrate the ability to achieve accurate predictions given by a mean square error (MSE) of 0.0338 mm2 within 10ms.
Introduction
Image-guided neurosurgery integrated with robotic systems can achieve high accuracy with improved patient care experience1. Real-time prediction of the brain deformation and operation forces is important for intervention accuracy but very challenging. Patient specific biomechanical models based on MR images could provide computational predictions for both deformation and reaction force1, 2. However, real-time application is impossible due to high computational costs3. In this study, we proposed to establish a biophysically realistic model using a MR brain atlas image. The computational output from an interventional process was learned using an ANN. Results demonstrated the potential of trained ANN for real time patient specific applications.
Methods
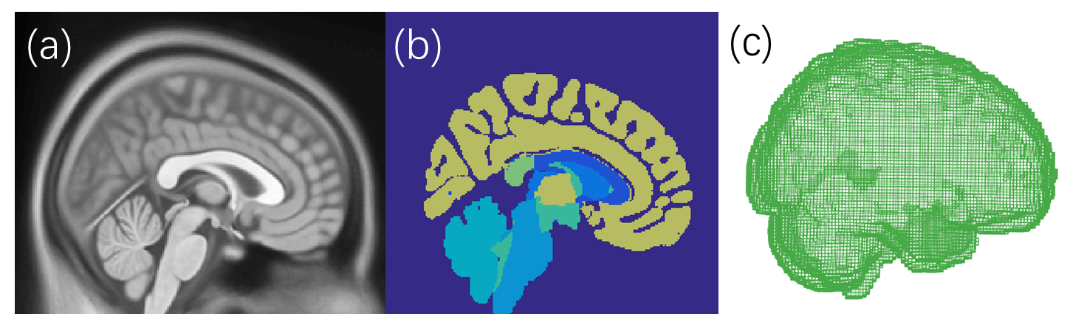
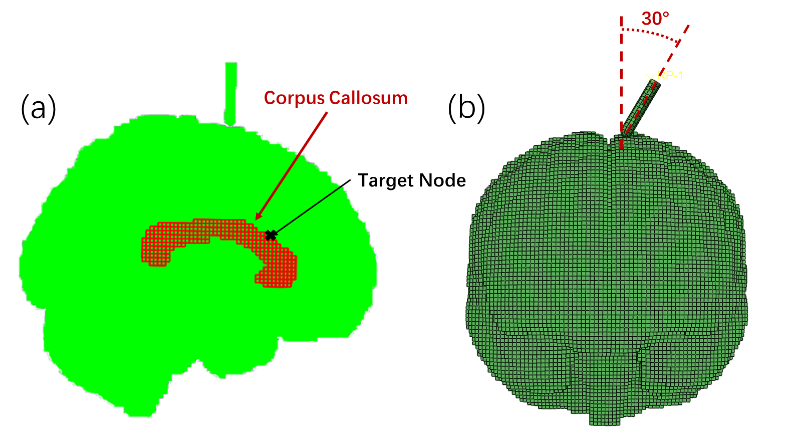
A brain model was constructed based on a probability atlas of a brain MR image (Figure 1)4. To maintain the biomechanical fidelity of the model, anatomical regions of white matter (WM), cerebro-spinal-fluid (CSF), brain stem (BS), cerebellum (BE), blood vessel (VE), corpus callosum (CC) and gray matter (GM) were constructed. Mapping from the image space to the physical space consists of 2mm isotropic hexahedron meshes. Tissue properties of the brain were assigned using reported human data5, while the intervention needle was treated as a rigid body. Displacement of a target node in the CC region was traced during the deformation of the brain (Figure 2a). Training data sets for the ANN were computed by simulating a needle insertion process with the following scenarios: 1) inserting angles from 0° to 30° with an increase of 1° with respect to the midline of the brain in the transverse plane (Figure 2b); 2) 8 different inserting locations; 3) inserting depth from 0mm to 30mm with a increment of 1mm. The final dataset consists of 7688 data where 6727 were used for training and 961 for testing. Simulations were carried out using ABAQUS/Explicit 6.17 (Simulia, Providence, RI).
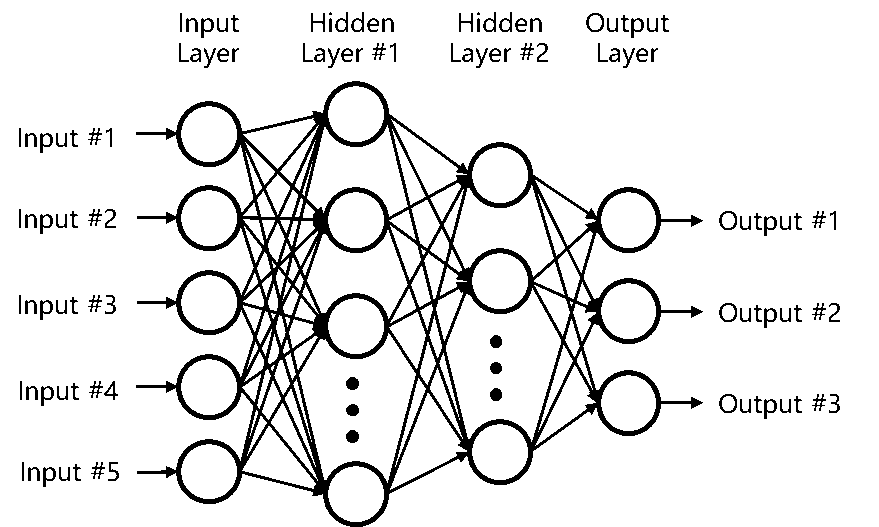
The ANN constructed has a total of 4 layers with node numbers from input to the output layer of 5, 256, 128 and 3, respectively (Figure 3). The activation function of each node is the ReLU function and the cost function during backpropagation is the mean square error (MSE). The network was trained using the optimizer Adadelta with random initial weights of the nodes, while the batch-size and epochs were set to 64 and 30 respectively. To split the data, one out of the 8 insertion locations was selected as test data. For the remaining training data, 20% was selected as validation set during each training epoch. The ANN was implemented using Keras withTensorflow as backend.
Results
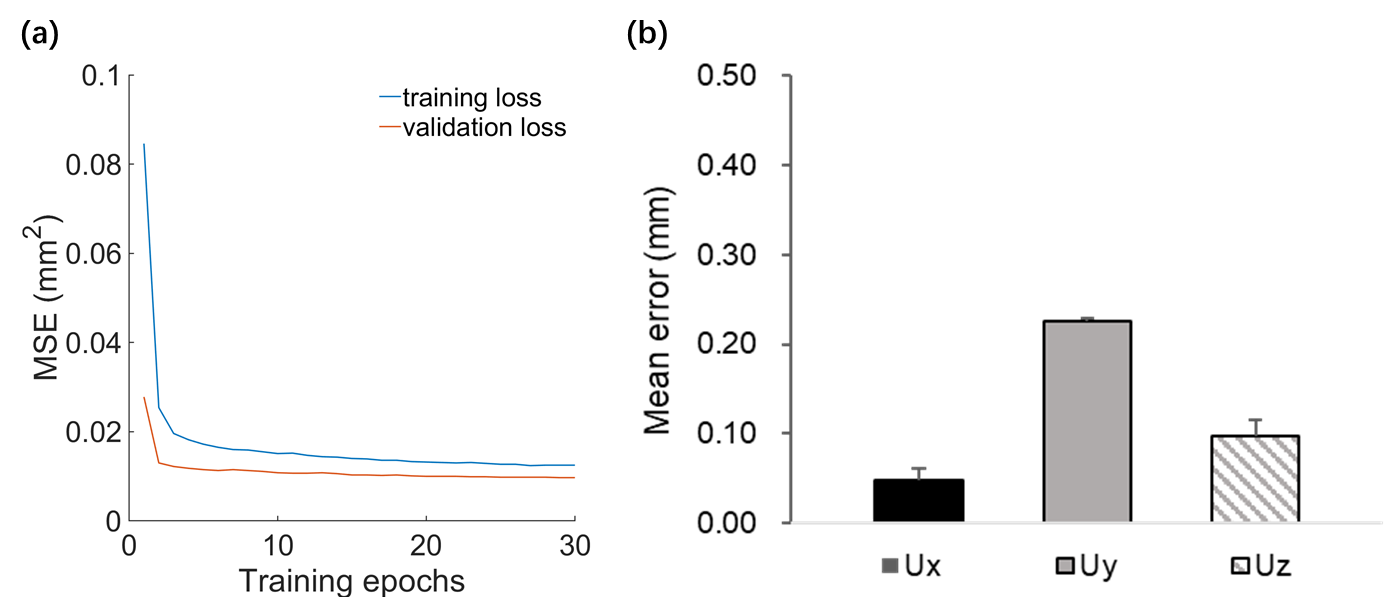
The averaged trajectory of the resulting MSE on the training and validation dataset showed that the ANN can capture the model behavior (Figure 4a). During the first 5 epochs a significant drop is recognizable, afterwards the MSE is rather constant. The validation trajectory is lower during the whole training, while they are similar at the 30th epoch where the MSE is approximately 0.01 mm. The average MSE of the displacement along x, y and z direction are 0.048mm, 0.225mm, and 0.079mm respectively (Figure 4b).Discussion
Compared with similar work for real-time prediction of soft tissue deformation, our results had a better performance in both accuracy and computational cost. Mosbech et al. (2009) reporting a MSE around 1.4 mm with only one deformation output at a time6. Few researchers have considered multiple outputs of one neural network3, 6. Our network can predict three parameters at the same time. Results showed that ANNs capture the complex biomechanical behavior of the brain model with accuracy and speed. This provides potentials for real-time applications of image-guided robotic neuro interventions. Future work includes improving the model structure and resolution while applying the trained model for patient specific cases.Acknowledgements
Funding is provided by grant 31870941 (YF) from National Natural Science Foundation of China. Start-up grant from SJTU is also acknowledged.References
1. Cleary K, Peters TM. Image-Guided Interventions: Technology Review and Clinical Applications. Annual Review of Biomedical Engineering. 2010;vol. 12, no. 1, pp. 119-142.
2. Delingette H, Ayache N. Building Patient-Specific Physical and Physiological Computational Models from Medical Images. Handbook of Biomedical Imaging. Springer. 2015;Boston, MA.
3. Tonutti M, Gras G, Yang GZ. A machine learning approach for real-time modelling of tissue deformation in image-guided neurosurgery. Artif Intell Med. 2017;80: 39-47.
4. Mazziotta J, Toga A, Evans A, et al. A probabilistic atlas and reference system for the human brain: International Consortium for Brain Mapping (ICBM). Philos Trans R Soc Lond B Biol Sci. 2001;356: 1293-1322.
5. Finan JD, Sundaresh SN, Elkin BS, McKhann GM, 2nd, Morrison B, 3rd. Regional mechanical properties of human brain tissue for computational models of traumatic brain injury. Acta Biomater. 2017;55: 333-339.
6. Mosbech TH,Ersbøll BK, Christensen LB. An efficient data-driven tissue deformation model. 2009 IEEE 12th international conference on computer vision workshops,ICCV workshops. 2009;1771–7.
Figures