3837
Phantom Study of Novel Biopsy Needle and Assisted Robotic System Designed for Prostate Biopsy Procedure under MRI1Biomedical Engineering, Bogazici University, Istanbul, Turkey
Synopsis
In this study, a novel MRI guided prostate biopsy device was designed, produced and tested under MRI. In this scope, a MRI compatible, remote controlled, transrectal biopsy delivery system, a MRI compatible biopsy gun, a MRI compatible, biopsy needle which can be tracked under MRI, and a computer based control unit were designed and a prototype was produced. The robotic prostate biopsy device prototype was tested under MRI with in-vitro experiments using a commercially available prostate phantom.
Introduction
The prostate cancer (PCa) is the one of the most frequently diagnosed cancer type in men with very high mortality rate1. In clinical routine, PCa diagnosis is performed with transrectal ultrasound (TRUS) imaging guided biopsy operation. Although, TRUS biopsy is the current golden standard for prostate biopsy %20 false-negative result were reported2 because 40% of the PCa lesions were reported to be iso-echoic under ultrasound imaging3. With this project we aim to address current diagnostic issues of PCa and eventually provide much reliable diagnostic tool for PCa. The main purpose is performing whole prostate biopsy procedure under MRI which provides better visualization of PCa lesions. Due to the technical limitations of working under MRI we developed a novel MRI compatible, remote controlled robotic biopsy delivery system and MRI visible biopsy tools to perform prostate biopsy.Methods
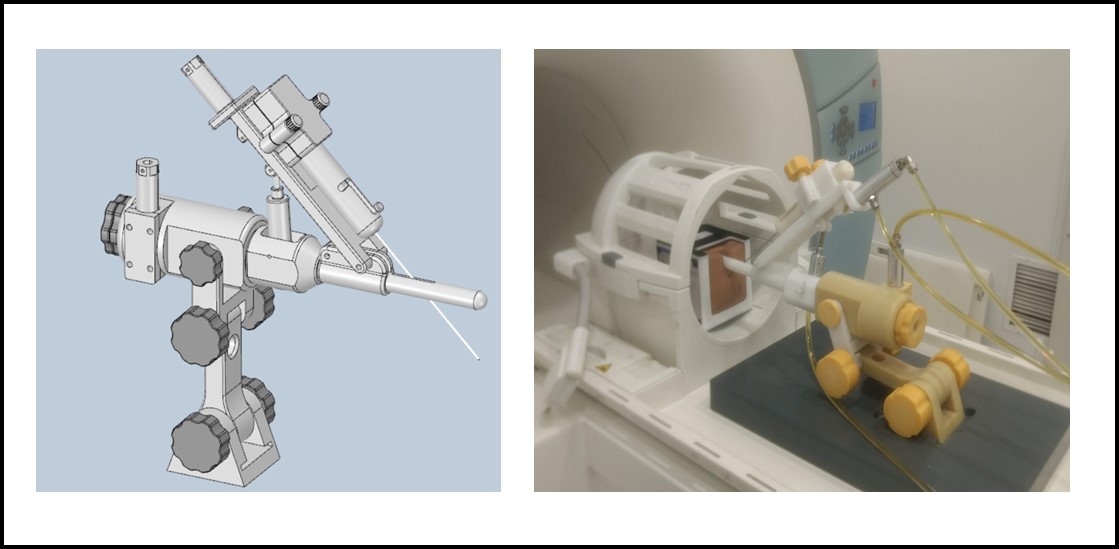
Performing any clinical procedure under MRI requires special tools or devices due to the nature of MRI. The robotic prostate biopsy device was designed to cope with the complexities and limitations of working under MRI. Initially, anatomically compliant robotic biopsy delivery device was designed (figure 1). In this design, three degrees of freem (DoF) remote control and three DoF manual control was included. The manual controls were used to position the biopsy delivery system and remote controls were used to target and reach the cancer lesions inside the prostate. Besides, the distal end of the biopsy delivery system was designed to have equidistantly placed MRI contrast agents in order to track the insertion of the distal tube trans-rectally. By this means it was possible to track and locate the biopsy delivery system inside the patient/phantom image. The biopsy delivery system was produced from non-metallic, non-ferromagnetic materials in order not to disturb the homogeneity of magnetic field and to prevent heating due to RF power transmission. The biopsy gun designed to fit onto the biopsy delivery system. Similarly, MRI compatible materials were used to produce the biopsy gun. Tight fit coaxial nitinol tubes were used to produce inner (Confluent Medical Technologies, 0.0370 inch) and outer (Confluent Medical Technologies, 0.0580 inch) biopsy needles. Both nitinol tubes were shaped using a Nd:YAG laser cutting system in order to extract sufficient biopsy samples. Nitinol tubes were also marked with iron-oxide (Fe2O3) strips using physical vapor deposition system in order to locate and measure the insertion depth of the biopsy needle.The actuation of the remote controls on robotic biopsy device was obtained using hydraulic cylinders. For each remote control one MRI compatible hydraulic cylinder (slave) was placed on the robotic biopsy delivery system and one hydraulic cylinder (master) was placed outside the MRI room. The master and slave hydraulic cylinders were connected in series and the line was loaded with 2 bar pressure. The master cylinder was controlled with a Raspberry-Pi based motor control system (figure 2). The slave cylinder inversely replicated the movement of the master cylinder.Results
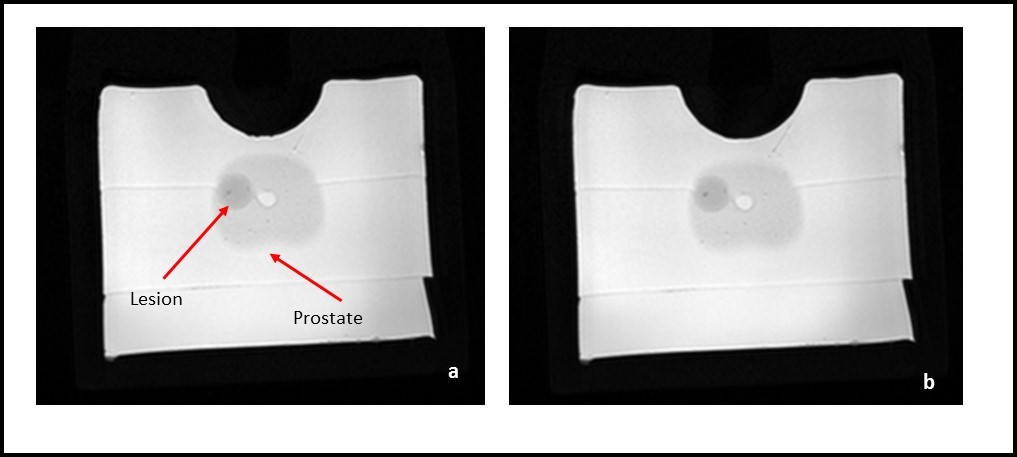
The transrectal biopsy delivery system, biopsy gun, biopsy needles and robotic remote control were tested under MRI using a prostate phantom (CIRS, 053L). A 3T MRI scanner (Siemens Medical Systems) and 12ch head coil were used to image the prostate phantom and lesions inside the prostate phantom. The MRI compatibility of the robotic biopsy delivery system was tested using a T2 weighed Turbo Spin Echo sequence (TR: 4000 ms, TE: 102 ms). The SNR loss due to introducing the biopsy delivery system was measured as less than 3%. (figure 3) In order to obtain 3D images SPACE sequence (TR: 3000, TE: 424) was used to perform the biopsy procedure. In three consecutive movements it was possible to get biopsy samples from the lesion inside the prostate with 1 mm accuracy.Discussions
Performing prostate biopsy procedure under MRI with a remote control capability will help clinicians to diagnose PCa with better reliability in a better workflow compared to conventional TRUS biopsy which will eventually help to combat with PCa. Moreover, the study showed that other clinical procedures might leverage from image quality of MRI and might be performed under MRI with a similar robotic system.Conclusions
The robotic biopsy delivery system was designed and the feasibility of performing prostate biopsy procedure was validated using a commercial prostate biopsy phantom under MRI. The robust and stable mechanical design of the hydraulic based robotic biopsy system enabled to reach target location with 1 mm accuracy. The real time MRI imaging during phantom studies also confirmed the MRI compatibility of both biopsy needle and assisted robotic system. The tumor locations within the phantom were clearly visualized throughout the procedure without compromising the image quality.
Acknowledgements
This project is funded by Scientific and Technological Research Council of Turkey (TUBITAK) 1001 programme with project ID:115E271.References
1. Torre LA, Bray F, Siegel RL, Ferlay, et al. Global Cancer Statistics. CA Cancer Journal. 2012;65(2): 87-108.
2. Rabbani F, Stroumbakis N, Kava BR, et al. Incidence and Clinical Significance of False Negative Sextant Prostate Biopsies. The Journal of Urology. 2004;159(4):1247-1250
3. Presti JC, Jr. O’Dowd GJ, Miller MC, et al. Extended Peripheral Zone Biopsy Schemes Increase Cancer Detection Rates and Minimize Variance in Prostate Specific Antigen and Age Related Cancer Rates: Results of a Community Multi-Practice Study. The Journal of Urology. 2003;169: 125-129.
Figures