1593
Plastic Bricks in MRI: An Efficient Way to Build Static and Dynamic Phantoms1Institute for Diagnostic and Interventional Radiology, University Medical Center Göttingen, Göttingen, Germany
Synopsis
Novel MRI techniques are typically tested on phantoms, hence static and dynamic phantom setups are required during development. However, MRI phantoms are either off-the-shelf components which are expensive and not very flexible or are custom-built which is time-consuming and often requires specialized equipment. Here we report our experience using plastic bricks to build a variety of static and dynamic phantoms.
Introduction and Purpose
Every MRI lab owns a number of generic MRI phantoms. However, these phantoms are often expensive and adapted to specific imaging problems. In particular, motion phantoms require professional design and construction and make use of shielded electronics, costly piezoelectric-motors [1] or pneumatic elements [2].
An alternative to out-the-shelf MRI phantoms are custom-built phantoms made of plastic bricks, e.g. manufactured by LEGO® [3], Mega Bloks® or Qbricks®. These bricks are cheap but of high production quality and allow the design of phantoms with complicated structure. The bricks are typically made of Acrylonitrile-Butadiene-Styrene (ABS) and, submerged in water, appear black in conventional 1 H-MRI. Although this idea is well known to the community [4,5,6,7,8], the rich field of applications of plastic bricks in MRI has not been fully exploited.
Following Roger Penrose's famous quote "Science and fun cannot be separated", we explored the use of plastic bricks and LEGO® Pneumatic/Technic to create problem-adapted static and dynamic motion phantoms which are used to test and validate advanced imaging techniques like Simultaneous-Mulit-Slice (SMS) [9] or Real-Time MRI [10].
Methods
We present a structural brick phantom specifically designed to evaluate image quality in the context of simultaneous-multi-slice (SMS) imaging and two pneumatic motion phantoms as well as an air-flow propelled motion-driving equipment to evaluate a dynamic/real-time imaging method. All measurements are performed on a SIEMENS Skyra 3T scanner.
Static Structure Phantom for Simultaneous-Multi-Slice Imaging
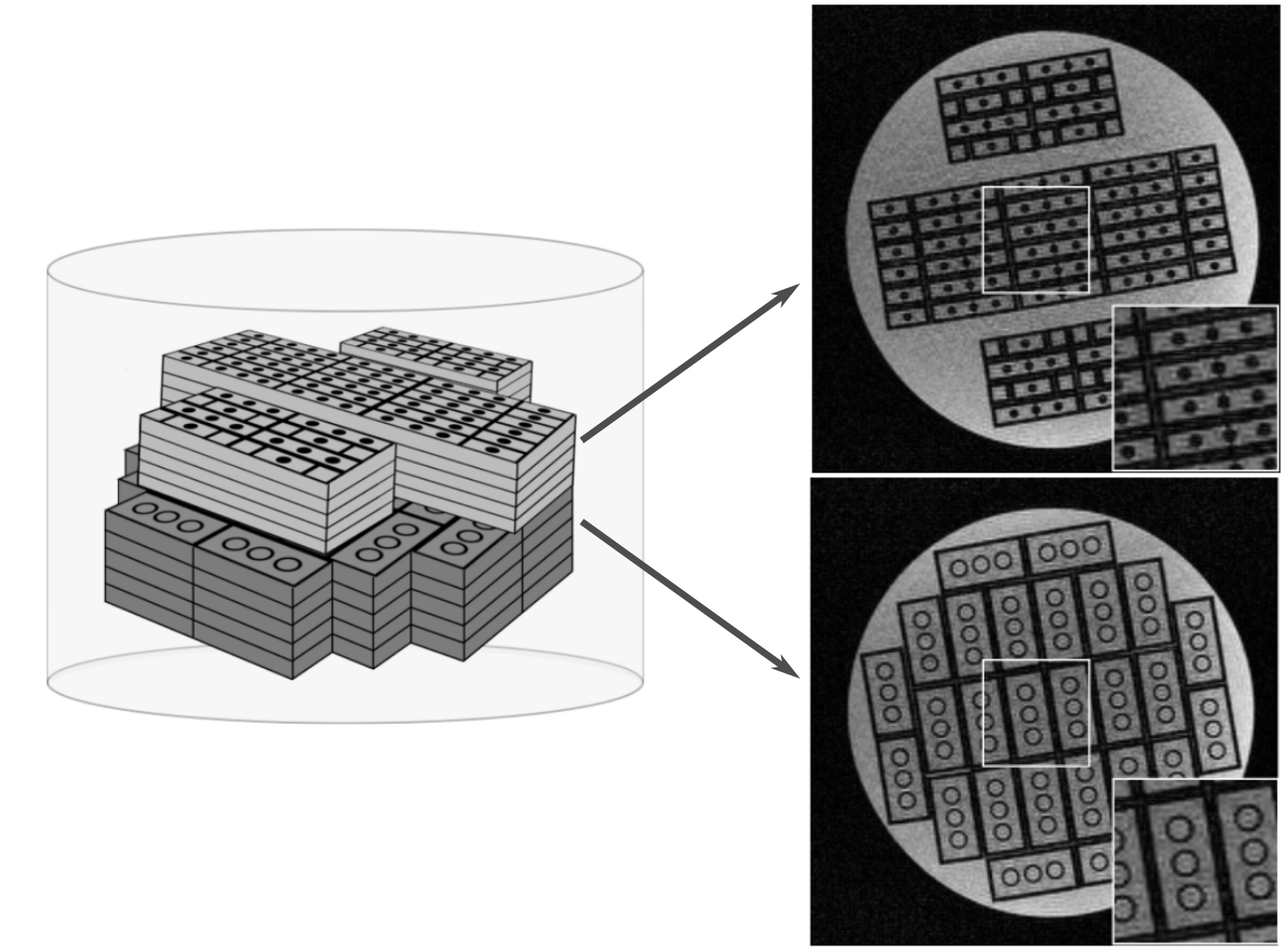
In SMS imaging, multiple slices are excited simultaneously, hence a superposition of multiple slices is acquired [9]. Therefore, the main challenge is to reliably separate all superposed slices. By choosing different types of plastic bricks, we can design a phantom which features a variable layer structure (figure 1, left) [11,12].
Pneumatic Motion Phantom
The first generation of LEGO® Pneumatic pistons does not include metal parts and therefore is MR compatible. Using them we present two possible designs for testing of real-time MRI sequences.
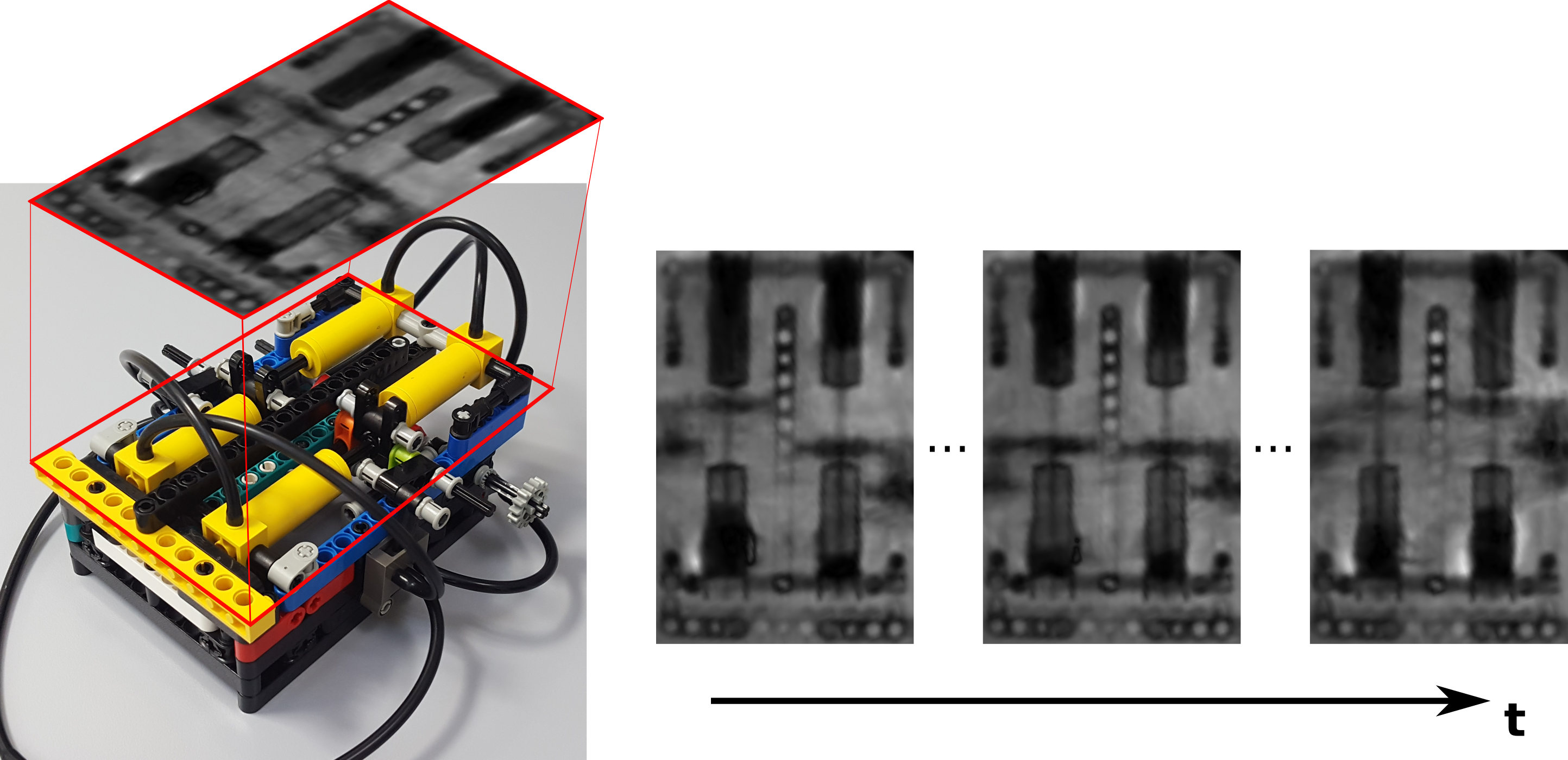
Linear Design. The pneumatic linear design (Figure 2) inspired by [13] is driven by constant air pressure, which is controlled by valves whose control rods are tuned to the actual cylinder positions. The cylinders are forced to move along a linear axis. This motion can be translated into a circular one using a crankshaft. We use the NLINV real-time MRI technique [10] with online reconstruction and bSSFP readout to image the phantom in motion at 30.8 ms/frame. The air-flow rate was set to 2l/min at up to 5bar. Representative movie frames are depicted in Figure 2.
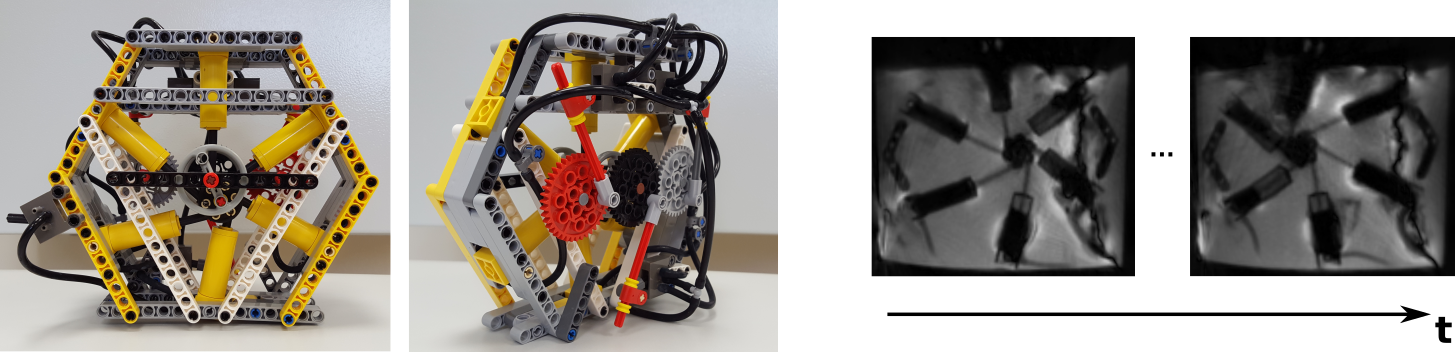
Star Design. The pneumatic star design (Figure 3) inspired by [14] uses six pistons which are located on the same level. Each of the three opposed pairs are controlled by a different valve. They are tuned by gearwheels driving an shaft clockwise. The real-time measurements were performed as in the linear setup. Representative results are shown in Figure 3.
Motion-Driving Equipment
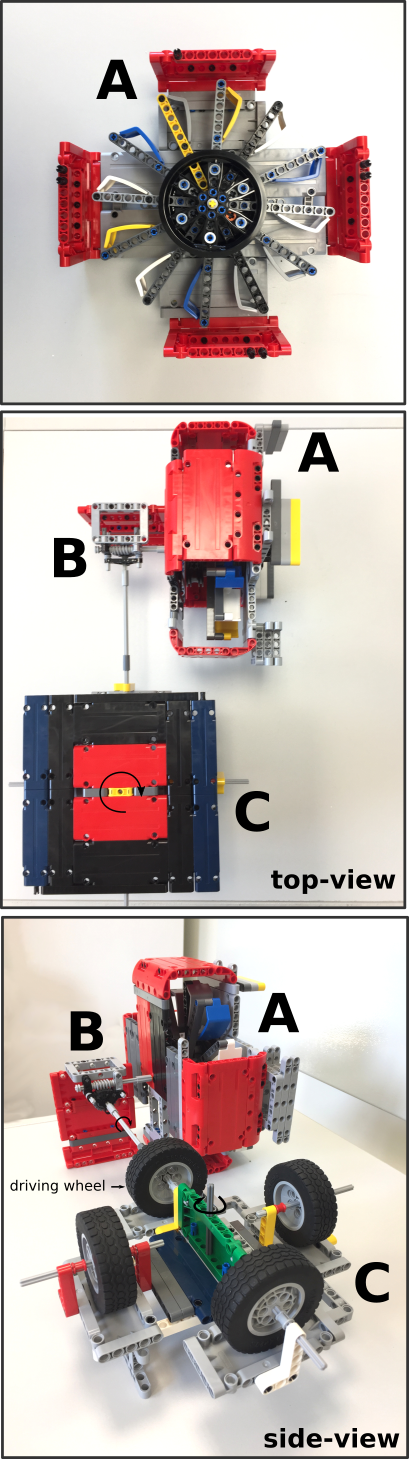
Inspired by [2] the windmill design (Figure 4) can be used to set arbitrary MRI phantoms into rotational motion without using pneumatic elements. The windmill is wheeled by 15l/min and up to 5bar air pressure.
Results and Discussion
Figure 1 (right) shows two perfectly disentangled slices, hence in [11] the authors could draw the conclusion that the SMS reconstruction was successful.
Representative images of the pneumatic real-time MRI experiments are shown in Figures 2 and 3. The single input/ouput pistons of the pneumatic phantoms come with two challenges: First, the air-release through valves during compression can cause artifacts. Second, the pistons can only expand actively and have to be retracted passively, which might limit a fluent motion and make MR-compatible pistons with a double input/output preferable.
Although the star motor setup leads to a more complex motion in just a single plane it is more sensitive to incorrect adjustments of the valves. The linear setup is more robust.
The presented windmill-design allows to rotate arbitrary phantoms of up to 700g of weight. The rotation can also be converted into a linear motion with minor modifications.
Conclusion
Plastic bricks are cheap and versatile (and slightly distracting) components for the construction of static and dynamic MRI phantoms as well as motion-driving equipment. The use of plastic elements allows rapid, application-matched phantom prototyping at a fraction of the costs of dedicated MRI phantoms and offers even more possibilities when combined with techniques like 3D printing [15].
Acknowledgements
Nick Scholand and Sebastian Rosenzweig contributed equally to this abstract. We thank Judith Bauch for assistance on the construction of the windmill.References
[1] Barberi EA, Munro Miller DJ, Dietrich JM, Hartman NG, inventor; MODUS MEDICAL DEVICES INC., assignee. Piezoelectric motor assembly. U.S. Patent 10,090,781 filed January 13, 2017.
[2] Schaetz S, Untenberger M, Niebergall A, Frahm J. Motion Phantom for Real-Time MRI. Annual Meeting ISMRM, Salt Lake City 2013, In Proc. Intl. Soc. Mag. Reson. Med. 21; 4340 (2013).
[3] The Lego Group. A Short Presentation. Page 12. 2014. Retrieved from "https://www.lego.com/de-de/aboutus/lego-group/company-profile" at the 04.11.2018.
[4] Wright SM, McDougall MP. Single echo acquisition MRI using RF encoding. NMR in Biomed. 2009; 9:982--993.
[5] Sosnovik DE, Dai G, Nahrendorf M, Rosen R, Seethamraju R. Cardiac MRI in mice at 9.4 Tesla with a transmit-receive surface coil and a cardiac-tailored intensity-correction algorithm. J Magn Reson Imaging. 2007; 2:279--287.
[6] Solomon E, Liberman G, Zhang Z, Frydman L. Diffusion MRI measurements in challenging head and brain regions via cross-term spatiotemporally encoding. Nature Scientific Reports 2017; Volume 7, Article number: 18010.
[7] Yang Y, Liu F, Li M, Jin J, Weber E, Liu Q, Crozier S. Pseudo-Polar Fourier Transform-Based Compressed Sensing MRI. IEEE Trans. Biomed. Eng. 2017; Vol. 64, No. 4.
[8] Fiorini C, Peloso R, Longoni A, Mennini T, Micotti E. Study of Compatibility of a Silicon Drift Detector With a MRI System. IEEE Trans. Nucl. Sci. 2011; Vol. 58, No. 2.
[9] Larkman DJ, Hajnal JV, Herlihy AH, Coutts GA, Young IR, Ehnholm G.Use of multicoil arrays for separation of signal from multiple slices simultaneously excited. J. Magn. Reson. Imaging 2001; 13:313--317.
[10] Uecker M, Zhang S, Frahm J. Nonlinear Inverse Reconstruction for Real-time MRI of the Human Heart Using Undersampled Radial FLASH. In: Magnetic Resonance in Medicine 63:1456-1462 (2010).
[11] Rosenzweig S, Holme HCM, Wilke RN, Voit D, Frahm J, Uecker M. Simultaneous multi-slice MRI using cartesian and radial FLASH and regularized nonlinear inversion: SMS-NLINV. Magn. Reson. Med. 2018; 79:2057--2066.
[12] Rosenzweig S, Holme HCM, Wilke RN, Uecker M. Simultaneous Multi-Slice Real-Time Imaging with Radial Multi-Band FLASH and Nonlinear Inverse Reconstruction. In: Proc. Intl. Soc. Mag. Reson. Med. 25, Honolulu, 2017. p. 0518.
[13] Sariel's LEGO Workshop, September 30, 2012. Lego Technic Pneumatic Engines. Retrieved from "https://www.youtube.com/watch?v=G8YMigsZqeE".
[14] Seltmann W. Robocity. 6 Zylinder Sternmotor ( pneumatisch ). Retrieved from http://www.robocity.de/pneumatik-cat289.html".
[15] Gopalan K, Tamir JI, Arias AC, Lustig M. Toward 3D Printed, Anatomy-Mimicking, Quantitative MRI Phantoms. Annual Meeting ISMRM, Honolulu 2017; Abstract #3733.
Figures