1492
Minimally invasive implantable NMR microcoil for in vivo MRS and MRI in submicroliter volumes1Institut des Sciences Moléculaires, CNRS, Université de Bordeaux, Bordeaux, France, 2NIMBE, CEA Saclay, Gif-sur-Yvette, France
Synopsis
Due to sensitivity and invasiveness issues, the use of implanted NMR microprobes remains a poorly explored field of research, with no emerging or significant biomedical applications. In this study, we report the realization, characterization and applicaiton of an innovative design for implantable microprobe allowing a drastic minimization of the probe invasiveness. The results obtained in vitro and in vivo demonstrate the potential of this microprobe architecture for MRS and MRI investigation of organs and tissues in submicroliter volumes.
Introduction
Despite the variety and wealth of biological information that can be obtained through MRS or MRI, the use of implanted NMR microcoils still remains a relatively unexploited research area, without emerging or significant biomedical applications. The limitations inherent to implanted NMR coils derive obviously from the relatively weak detection sensitivity of NMR, hindering great challenges for nano-volume analyses. In addition, the necessity to preserve tissue during microprobe implantation imposes severe constraints on the geometry and structure of the NMR microcoil. Indeed, the implantation of microsensors in soft tissue such as brain requires needle-shaped devices with outer diameter typically restricted to a few hundreds of micrometers (1,2). Unfortunately, filar type antennae are poorly efficient structures for the NMR detection of magnetization. In this study, we present in vitro and in vivo results obtained with an innovative and minimally invasive microcoil.Materials and methods
The architecture of the NMR microprobe is sketched in Figure 1. Copper wires (with diameter of 50 or 100 μm) were wounded (2 turns) around a thin cylindrical rigid support (250-μm diameter). Both sides of the wire were then twisted together and inserted inside a biocompatible polyamide tubing (12-mm length with inner and outer diameter of 350 and 380 μm). The rigid support was then removed and a biocompatible glue was used to seal the polyamide tube and to fix the surface coil at the extremity of the polyamide tubing. The two sides of the wire were then connected to variable tuning and matching capacitors mounted on an adjacent circuit board. The connecting wires between the upper exit of the polyamide tubing and the tuning capacitor were 12 mm in length. The microcoils were tuned to either 200 or 300 MHz, corresponding to proton Larmor frequency at 4.7 and 7 T. The photograph in Figure 2 shows one example of manufactured microprobe using 50-μm diameter wire and a 320-μm diameter surface coil. In vitro and in vivo experiments were performed using Bruker Biospec MRI scanners (4.7 and 7 T) running under Paravision. NMR spectra were acquired using single-pulse sequence with typical excitation pulse length of 7 μs and 2 W excitation pulse power. Shimming was performed using an automatic first‐ and second‐order Bruker shimming procedure. 3D MRI acquisitions were performed using ZTE sequence with TE=8 μs and FOV= 10 mm3. Male Wistar rats were used for in vivo experiment. The rats were anesthetized and positioned in a stereotaxic instrument for the implantation of a cannula (450-μm inner diameter) for latter insertion of the NMR microprobe in the animal brain. The in vivo MR experiments took place at least 24 hours after the surgery and positioning of the cannula.
Results
The quality factor of the loaded coils positioned within the MRI magnet were ranging between 30 and 40. The detection sensitivity and the spectral resolution of the microprobes were assessed in vitro in lactate solutions of known concentration. The FWHM’s of water peak were measured equal to 6 Hz at both magnetic field. NMR spectra acquired at 4.7 T on 1 mM sodium lactate sample are shown in Figure 3 with SNR of methyl lactate peak equal to 10 (100 averages, TR=2.5 s, 4-minutes acquisition time). In vivo results are illustrated in Figure 4 with NMR spectra obtained in the rat brain. In this particular example of water-supressed acquisition (2000 averages, 5-minutes acquisition), the FWHM of the lactate peak were in the order of 54 Hz and its SNR equal to 21. Figure 5 displays the RARE T1-weighted image slice including the implanted microprobe and the volume rendering of the 3D ZTE acquisition obtained with the microprobe. Based on the ZTE acquisitions, the sensitive detection volume of the microcoil is estimated at 300 nl.Discussion and conclusions
The objectives set in this
study were to produce an implantable NMR coil that is minimally invasive (at
least comparable to existing types of implanted microdevices) while providing a
detection sensitivity compatible with NMR. We opted for a
linear geometry with a detection field located at the end of the probe. This architecture
allows the diameter of the microprobe to be limited to a few hundred
micrometers and to collect signal in areas not affected by the insertion of
the microprobe. The MRS/MRI results obtained in vitro and in vivo
demonstrate the viability of this approach in terms of spectral resolution,
detection sensitivity and spatial selectivity. Foreseen applications
include MRI microscopy and the investigation of metabolism in submicroliter volumes in physiological
conditions and in diseases with metabolic dysfunctions (neurodegenerative
pathologies, transient ischemic attack and hypoxic situation and tumoral
environment).
Acknowledgements
The authors are grateful to Dr. Titus Lanz (RAPID Biomedical) for his valuable advices.References
1. Grayson A.C.R. et al. A BioMEMS review: MEMS technology for physiologically integrated devices. Proceedings of the IEEE. 92,1, 6-21 (2004).
2. P. Hickey, M. Stacy. Deep Brain Stimulation: A Paradigm Shifting Approach to Treat Parkinson's Disease. Frontiers in Neuroscience. 10, 173 (2016).
Figures
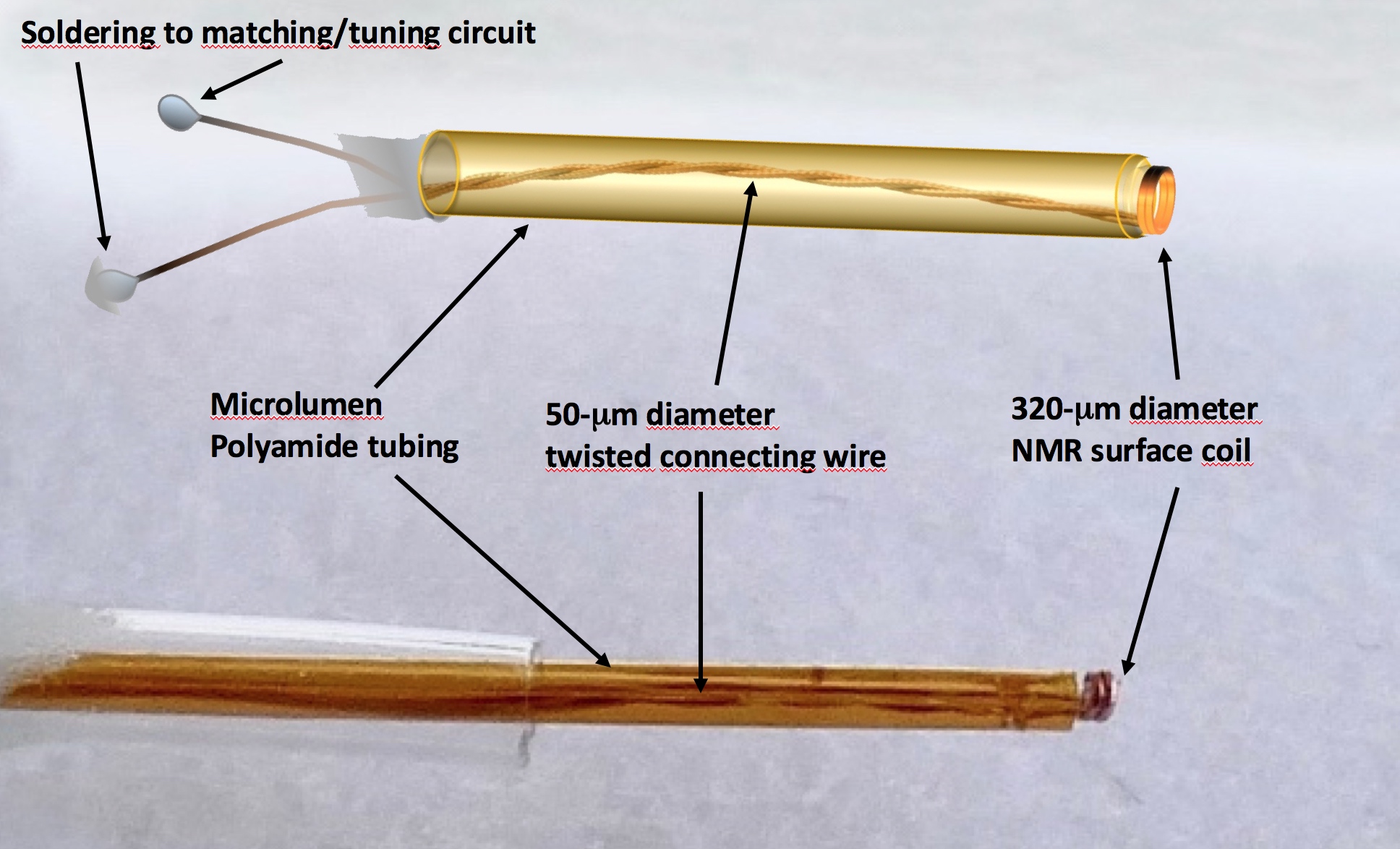
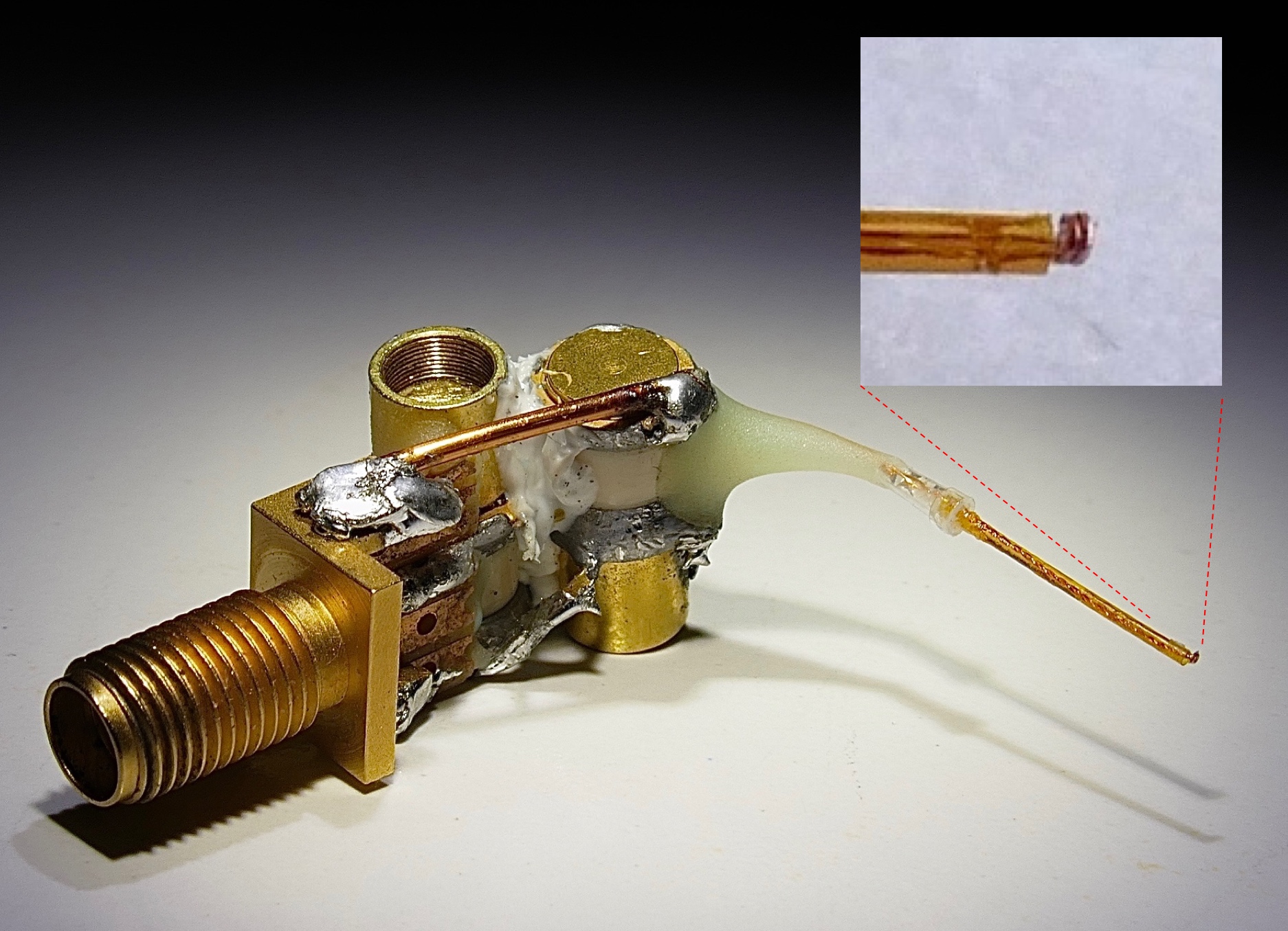
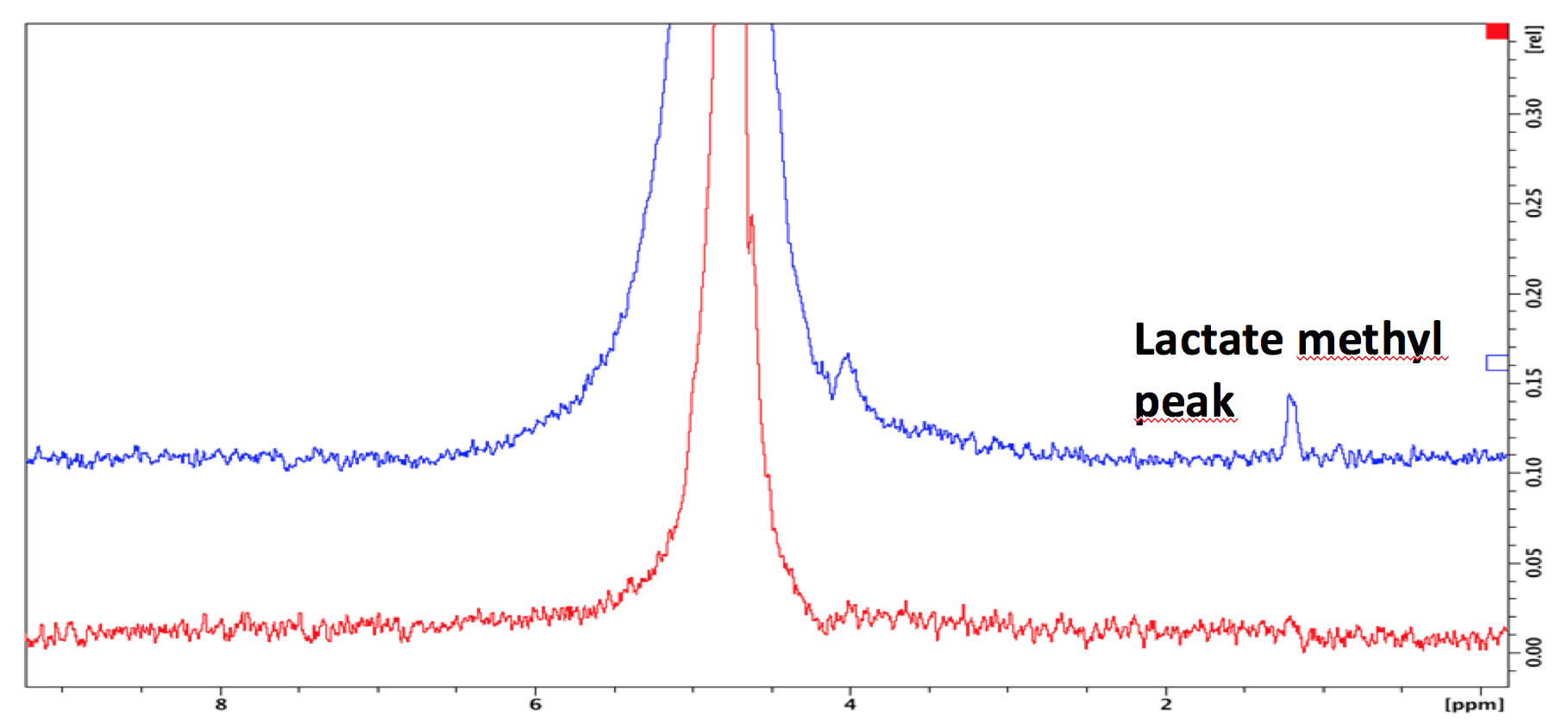
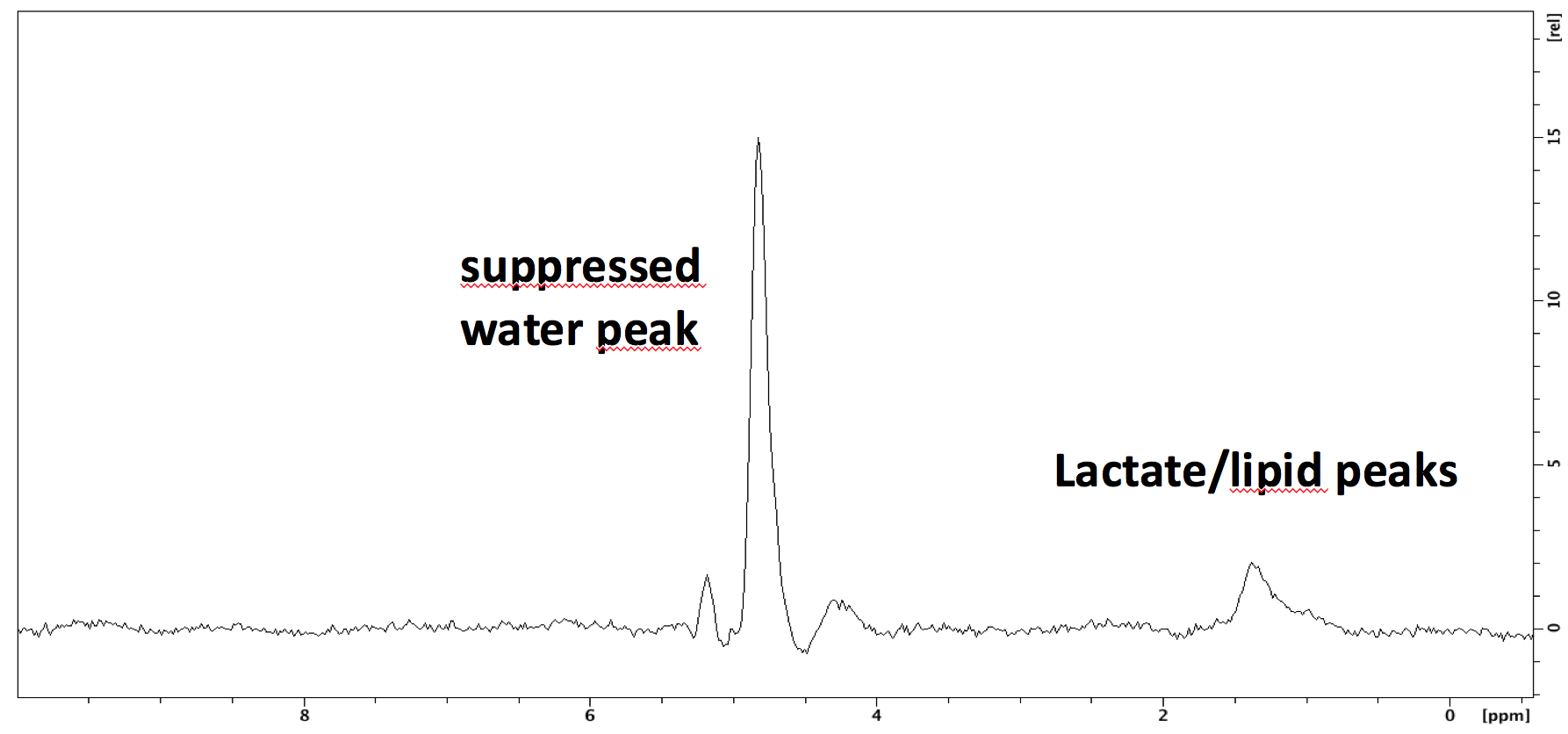
Fig4. In vivo microcoil acquisitions at 7 Tesla in rat brain. The FWHM of the lactate peak is in the order of 54 Hz and its SNR equal to 21 with 5 minutes total acquisition time.
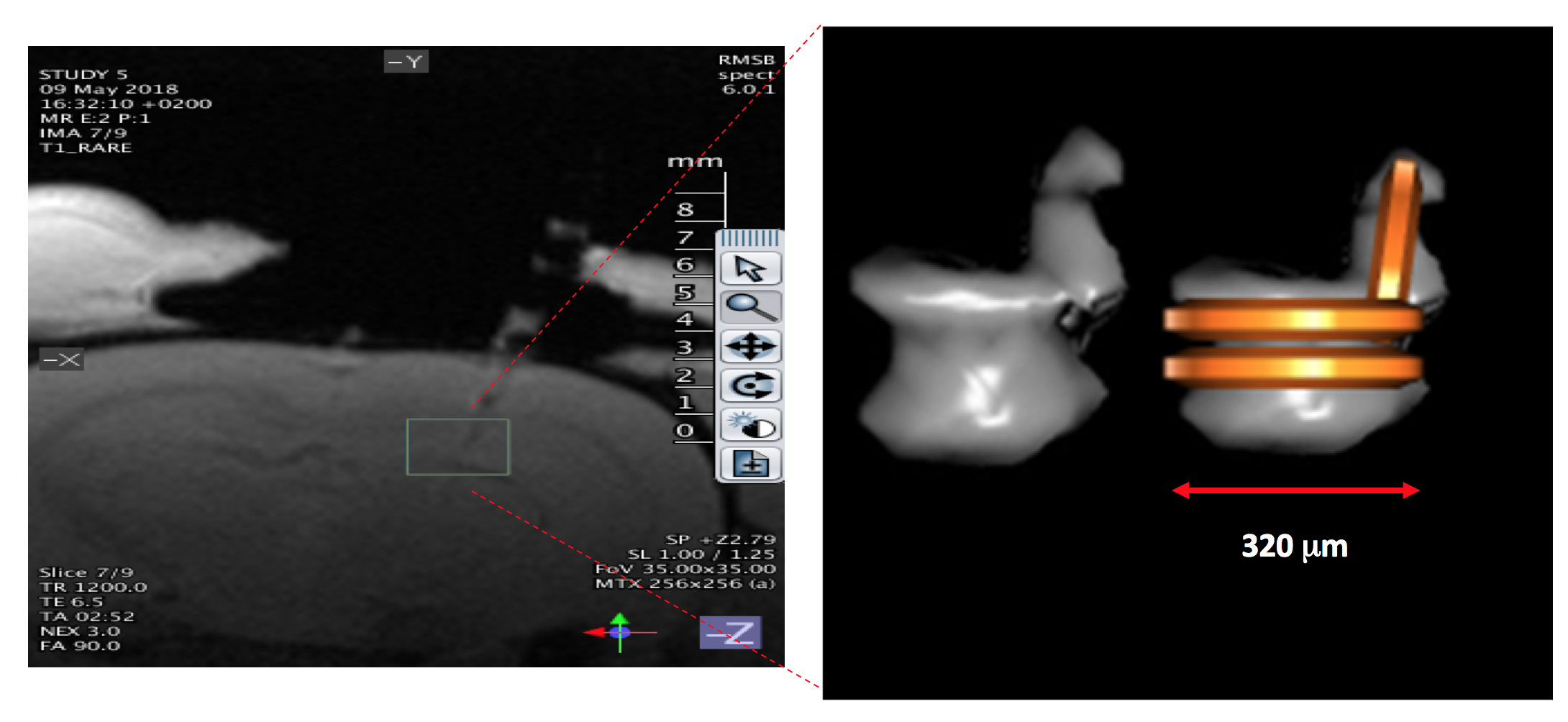
Fig5. The left side image displays the implantation path and the position of the microprobe in the rat brain. The right side images shows the volume rendering of the 3D ZTE acquisition acquired using the surface microcoil (superimposed to ZTE acquisition in the most right image). The sensitive volume of detection of the microprobe is in the order of 300 nanoliters.