1344
Changes in strain tensor resulting from atrophy induced by Unilateral Limb Suspension of the calf muscle.1Physics, UC San Diego, San Diego, CA, United States, 2Physics, San Diego State University, San Diego, CA, United States, 3Kanagawa University, Yokohama, Japan, 4Radiology, UC San Diego, San Diego, CA, United States
Synopsis
We quantified 3D strain tensor in the principle and muscle fiber basis along with two invariants (volumetric and octahedral shear strain) from multi-slice velocity encoded phase contrast images of the in-vivo human calf muscle under isometric contractions. Significant decreases in the medial gastrocnemius and soleus contractile strain eigenvalue and in the invariants with suspension may potentially arise from changes in muscle contractility and/or from extracellular remodeling. The significant reduction in shear strain may indicate a decrease in lateral transmission of force that may account for the disproportionate loss of force to loss of mass with atrophy.
INTRODUCTION
Chronic muscle atrophy induced by limb suspension (Unilateral limb suspension (ULLS)) is characterized by a loss of muscle mass and force1. However, several studies also indicate extracellular remodeling and its functional impact on lateral transmission of force as potential contributors to the loss of muscle function with age2. Here, we extract the full 3D strain tensor in the principle and muscle fiber (fiber aligned strains) basis and two strain invariants (volumetric strain and octahedral shear strain) from multi-slice dynamic imaging. Volumetric strain is clinically important as it relates to intramuscular pressure3 while shear strain is relevant as shear in the endomysium has been postulated as the most likely mechanism of lateral force transmission4. This study explores ULLS induced changes in 3D strain tensor in the medial gastrocnemius (MG) and soleus (SOL) from multi-slice velocity encoded phase contrast (VE-PC) images acquired under isometric contraction.METHODS
Seven subjects (IRB approved) were scanned on a 1.5T GE scanner before and after a four-week period of muscle atrophy induced on the non-dominant leg using the ULLS model. Gated VE-PC images obtained during isometric contraction at 35% MVC (TE: 7.7ms, TR: 16.4ms, NEX: 2, FA: 20°, 7 contiguous slices, thickness 5mm / skip 0, sagittal-oblique orientation, FOV: 30 × 22.5cm, matrix: 256 × 192, 4 views/segment, 22 phases, 3D velocity encoding, VENC: 10 cm/s)5. Lower leg was placed in a plaster cast with an embedded strain sensor and real-time visual feedback provided to the subject. Diffusion weighted images of the lower leg in relaxed state corresponding to first frame of VE-PC images and matching geometry were also acquired. Displacements were calculated by tracking voxels across the dynamic cycle in the phase images after phase correction and denoising. Strain tensor (E) was calculated by taking spatial gradient of the displacements (in x-,y-, and z-directions) obtained with respect to the first frame of the contraction-relaxation cycle. Principle basis eigenvalues (denoted by Efiber, Ein-plane, Ethrough-plane) were obtained through eigenvalue decomposition, octahedral shear strain (Eshear) and volumetric strain (Evol) were calculated using equation (1) and (2). In addition, components of the strain tensor in the diffusion basis (labeled f- muscle fiber, s- and t- secondary/tertiary diffusion eigenvector direction) were obtained by rotating SR tensor according to the equation (3) where R is the matrix of the diffusion eigenvectors in the voxel (obtained from the DTI data).
$$(1) \quad E_{shear} = \frac{2}{3}\sqrt{(E_{xx}-E_{yy})^2+(E_{xx}-E_{zz})^2+(E_{yy}-E_{zz})^2+6(E_{xy}^2-E_{xz})^2+E_{yz}^2}$$
$$(2) \quad E_{vol}=\frac{\delta V}{V}=E_{xx}+E_{yy}+E_{zz}$$
$$(3) \quad SR_{DTI} = R · SR · R^{T} $$
Quantitative analysis was performed for 3D regions of interest (28mm x 10mm x 15mm) placed inside the MG and SOL muscles. Position of each voxel inside ROI was tracked across the contraction-relaxation cycle. Differences in strain indices between pre- and post-ULLS groups extracted at the frame corresponding to max force were assessed using repeated measures two-way ANOVAs.
RESULTS
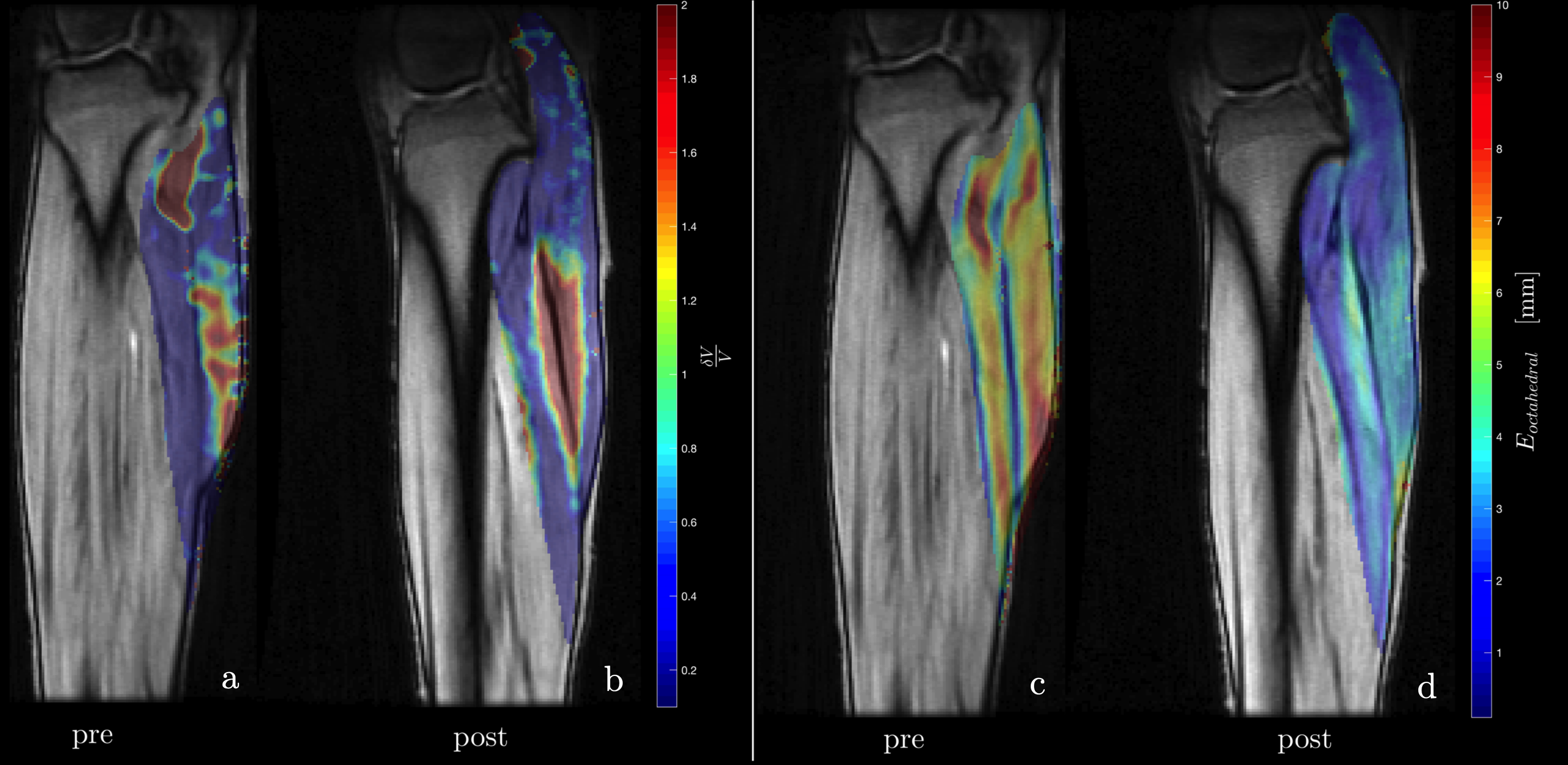
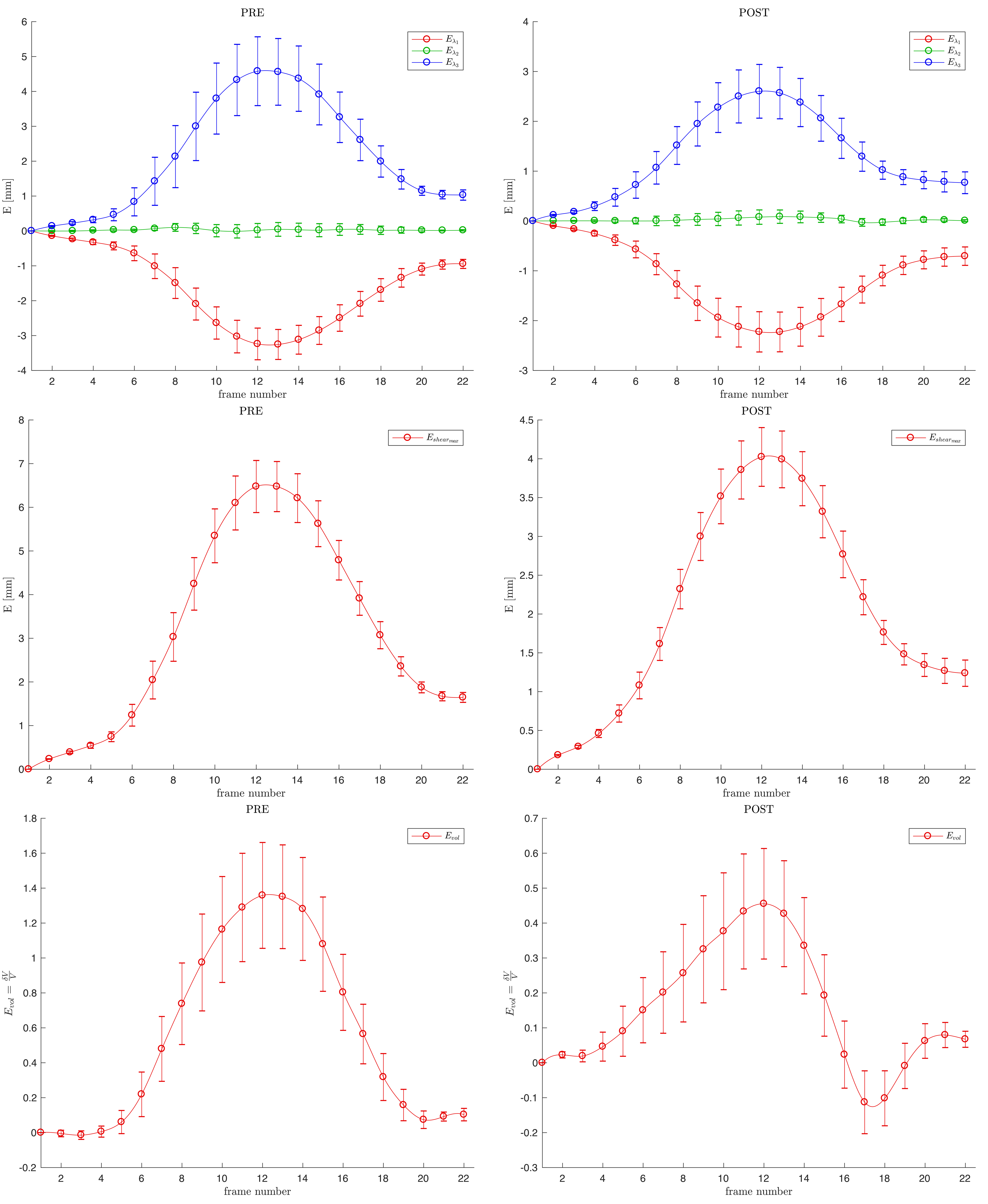
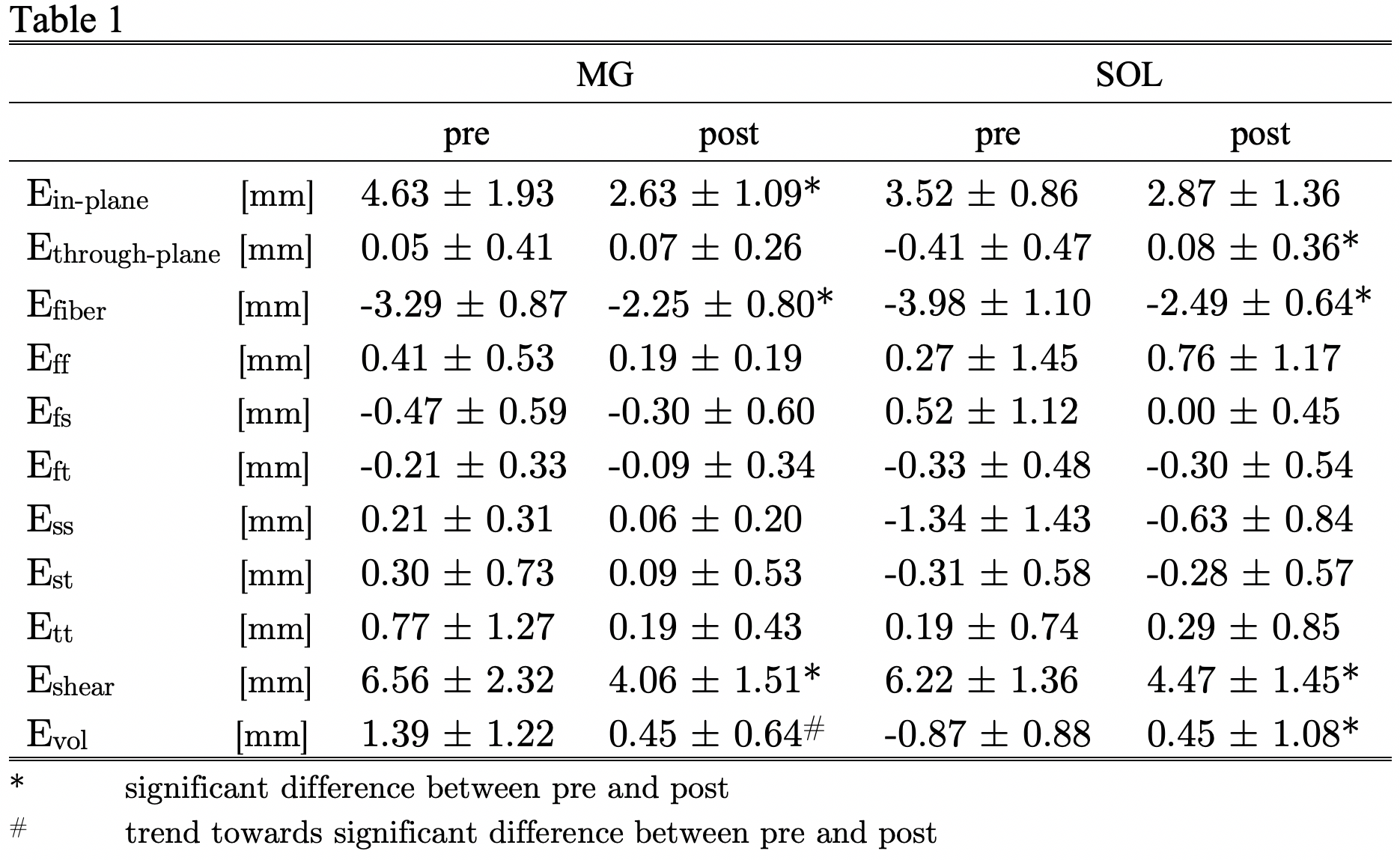
Fig. 1 shows the maps of volumetric and shear strain in one slice pre- and post-suspension (maximum strain frame of the dynamic strain maps). Fig. 2 shows the temporal plots of the principal strains, volumetric strain and octahedral shear strain averaged over all subjects (pre- and post-suspension) in the MG. Table 1 lists the MG and SOL strains in the principle and muscle fiber basis and the two invariants; significant changes with suspension are seen in Efiber, Ein-plane, and in Eshear (trend to significance in Evol) while Ethrough-plane is very small in pre- and post-suspension. The strain indices in the muscle fiber basis were smaller than in the principle basis and did not show any significant differences with suspension.DISCUSSION
The strain indices were reduced post-suspension for MG and SOL and may be related to decrease in inherent contractility as well as an increase in the stiffness of the extracellular matrix. The through-plane strain is very small and confirms earlier studies that reported asymmetric deformation in the fiber cross-section5. Force generated in the muscle fibers is transmitted longitudinally through the myotedinous junction and laterally through myofascial pathways (through shear of the extracellular matrix). It is to be noted that Eshear is larger than Evol for both MG and SOL possibly indicating shear as a dominant mechanism of force transfer. Further, a significant reduction in Eshear with suspension in both the MG and SOL may be a consequence of extracellular matrix remodeling and may reflect a decrease in lateral transmission of force with suspension.CONCLUSIONS
3D strain tensor analysis along with invariant indices derived from it have the potential to reveal changes in contractility and in the extracellular matrix and may enable the non-invasive determination of lateral transmission of force.Acknowledgements
This work was supported by the National Institute of Arthritis and Musculoskeletal and Skin Diseases Grant R01AG056999-01References
[1] De Boer MD, Maganaris CN, Seynnes OR, Rennie MJ & Narici MV. The Journal of Physiology2007; 583:1079–1091.
[2] Ramaswamy KS, Palmer ML, van der Meulen JH, Renoux A, Kostrominova TY, Michele DE, et al. J Physiol-London. 2011;589(5):1195-208
[3] Jensen ER, Morrow DA, Felmlee JP, Murthy NS, Kaufman KR.Physiol Meas. 2015;36:N135-46.
[4] Zhong X, Epstein FH, Spottiswoode BS, Helm PA, Blemker SS. J Biomech.2008;41(3):532-40.
[5]Malis V, Sinha U, Csapo R, Narici M, Sinha S. Magn Reson Med.2017;doi: 10.1002/mrm.26759.
Figures