1180
Prospective 3D+t non-rigid motion estimation at high frame-rate from highly undersampled k-space data: validation and preliminary in-vivo results1Center for image sciences, University Medical Center Utrecht, Utrecht, Netherlands, 2Utrecht University, Utrecht, Netherlands
Synopsis
We previously presented a framework to reconstruct 3D non-rigid motion-fields from highly undersampled k-space data by exploiting the lower-dimensional nature of motion-fields. Here, a quantitative comparison with a well-established image-based motion estimation is performed on 3D abdomen images. To also exploit temporal compressibility the framework is extended to reconstructions of spatio-temporal non-rigid motion-fields at high frame-rate, and validation is performed on 2D+t abdomen cine-acquisitions. Additionally, a dedicated non-Cartesian 3D trajectory was employed to prospectively acquire highly undersampled k-space data, and reconstruct 3D+t head motion at 16Hz. High quality respiratory/head motion-fields are obtained and the framework outperforms the fully-sampled image-based motion estimation even for undersampling up to 8x.
Introduction
3D time-resolved motion information is essential for MR-guided interventions/radiotherapy and cardiac imaging, but remains a challenge for state-of-the-art dynamic MRI methods. Image-based methods are limited by long acquisition times required for image reconstruction, despite possible accelerations through PI/CS1,2, and are therefore sub-optimal for motion estimation at high frame-rate (see Figure 1). Our previous work3 demonstrates a framework that avoids image reconstruction, and reconstructs 3D non-rigid motion-fields directly from highly undersampled$$$\hspace{1.5mm}k$$$-space data by inverting our dynamic MR-signal model. Significantly higher accelerations were possible compared to image-based methods by exploiting the spatial compressibility of motion-fields.
We first validate the framework by a quantitative comparison with well-established image-based motion estimation (optical-flow). To also exploit temporal compressibility, the framework is extended from spatial to spatio-temporal motion-field reconstructions. The spatio-temporal framework is validated on retrospectively highly undersampled$$$\hspace{1.5mm}k$$$-space data generated from 2D+t cine-acquisitions. Finally, a dedicated non-Cartesian 3D trajectory was designed and implemented to prospectively acquire highly undersampled$$$\hspace{1.5mm}k$$$-space data and reconstruct 3D+t head motion at 16Hz.
Theory
We assume3 mass conservation of a deforming object $$$q_t$$$ during steady-state acquisitions, such that it can be described completely with a reference image $$$q_\text{ref}$$$ and dynamic motion-fields $$$\mathbf{U}_t$$$ through$$q_t(\mathbf{r})=q_\text{ref}\left(\mathbf{U}_t(\mathbf{r})\right)\lvert \det\left(\nabla\mathbf{U}_t\right)(\mathbf{r})\rvert.\quad\quad(1)$$Combining (1) with a change-of-variables, the MR-signal at time$$$\hspace{1.5mm}t\hspace{1.5mm}$$$can be written as$$F(\mathbf{T}_t)[\mathbf{k}]=\int\hspace{0.05mm}q_t(\mathbf{r})e^{-i2\pi\mathbf{k}\cdot\mathbf{r}}\text{d}\mathbf{r}=\int\hspace{0.05mm}q_\text{ref}(\mathbf{r})e^{-i2\pi\mathbf{k}\cdot\mathbf{T}_t(\mathbf{r})}\text{d}\mathbf{r},\quad\quad(2)$$where$$$\hspace{1.5mm}\mathbf{T}_t\hspace{1.5mm}$$$represents the inverse of$$$\hspace{1.5mm}\mathbf{U}_t$$$. Equation (2) directly relates$$$\hspace{1.5mm}k$$$-space data to motion-fields.Methods
We assume a reference image$$$\hspace{1.5mm}q_\text{ref}\hspace{1.5mm}$$$is available, and acquire highly undersampled $$$k$$$-space snapshot signals $$$\mathbf{s}=[\mathbf{s}_1,\dots,\mathbf{s}_M]^T\hspace{1.5mm}$$$of$$$\hspace{1.5mm}N\hspace{1.5mm}$$$interleaves/snapshot in$$$\hspace{1.5mm}N\cdot\text{TR}\hspace{1.5mm}$$$seconds/snapshot. $$$\mathbf{T}\hspace{1.5mm}$$$is spatially parametrized with non-rigid affine and cubic B-spline motion-models4 for in-vivo brain and abdomen motion, respectively, and temporally with cubic B-splines. Motion-fields are reconstructed at $$$1/(N\cdot\hspace{1.5mm}\text{TR})$$$ Hz by solving a minimization problem with respect to motion-model parameters $$$\mathbf{\theta}$$$ (see Figure 2):$$\min_\mathbf{\theta}\quad\lVert\mathbf{F}(\mathbf{\theta})-\mathbf{s}\rVert_2^2+\mathcal{R}(\mathbf{T}).\quad\quad(3)$$Here the regularizer $$$\mathcal{R}$$$ is chosen as the curvature5 to penalize non-smooth deformations in space/time. (3) is solved using Matlab's interior-point algorithm and the reconstructed $$$\mathbf{T}$$$ are inverted to$$$\hspace{1.5mm}\mathbf{U}\hspace{1.5mm}$$$using Picard-iterations6. Finally, the reference image is warped using (1) to asses reconstruction quality. See Table 3a for sequence details regarding the following experiments.
First validation: comparison with well-established image-based motion estimation.
A quantitative comparison with optical-flow7,8,9 was performed using two fully-sampled, breath-hold, Cartesian 3D abdomen images. A snapshot $$$k$$$-space was generated from one image and was undersampled with several factors (see Table 3b) to cubes around the $$$k$$$-space origin, while the other was used as reference. The relative differences with the fully sampled acquisition were computed for the warped reference images.
Second validation: 2D+t reconstructions.
Snapshot $$$k$$$-space data was synthetically generated from free-breathing abdomen 2D+t cine MR-images and retrospectively undersampled to $$$30\times30\hspace{1.5mm}k$$$-space cubes around the origin (=125x undersampling). 2D+t motion-fields were reconstructed from this $$$k$$$-space data according to (3) for all dynamics at once. Dynamic images were obtained from (1) and compared with cine MR-images.
Reconstruction from prospectively acquired snapshots.
To reconstruct motion at high frame-rate, a dedicated fast non-Cartesian 3D trajectory was designed to prospectively acquire highly undersampled $$$k$$$-space snapshots at 16Hz, and implemented on a 1.5T scanner (Philips,Ingenia) as a repetition of 6 interleaves of a 3D cone trajectory10 (see top-right of Figure 2 for illustration). This corresponds to 480x undersampling in the number of read-outs.
Results
Table 3a shows that our method outperforms optical-flow even for undersampling up to 8x, and stays within 2% relative error for undersampling up to 64x. Higher undersampling requires more regularization, and quality degrades rapidly. This is likely caused by our sub-optimal curvature regularization for breathing motion.
Figure 4 shows good agreement with the ground-truth despite possible through-plane motion and intensity variations over time.
Figure 5 shows a dynamic 3D image sequence that was reconstructed using motion-fields acquired at 16Hz. The affine model recovered rigid motion and is consistent with the 8-shaped motion performed by the volunteer.
Discussion & Conclusion
Our framework3 bypasses the requirement of image reconstruction for motion estimation by focusing on the lower-dimensional problem of directly estimating motion-fields from $$$k$$$-space data. The framework is compared with state-of-the-art image-based motion estimation and extended to reconstruction of spatio-temporal deformation-fields. Reconstruction quality was evaluated on data generated from a 2D+t cine acquisition. Experimental feasibility was demonstrated by reconstructing 3D+t motion-fields at 16Hz from prospectively acquired highly undersampled $$$k$$$-space data using a dedicated 3D non-Cartesian trajectory. In all cases the proposed framework showed high quality reconstructions and higher accuracy than fully-sampled image-based motion estimation even for up to 8x undersampling of the input data.
Our method reconstructs 3D motion-fields at sub-second frame-rate, and has therefore great potential for MR-guided radiation therapy, which relies on similar dynamic information. Future research will address other spatio-temporal regularization and optimal trajectory design for even faster trajectories required by applications like cardiac imaging.
Acknowledgements
This research is funded by the Netherlands Organisation for Scientific Research, domain Applied and Engineering Sciences, Grant number: 15115.References
- Lustig M., Donoho D.L., Santos J.M., and Pauly J.M. Compressed sensing MRI. IEEE signal processing magazine, 25(2):72–82, 2008.
- Otazo R., Candès E., and Sodickson D.K. Low-rank plus sparse matrix decomposition for accelerated dynamic MRI with separation of background and dynamic components. Magnetic Resonance in Medicine, 73(3):1125–1136, 2015.
- Huttinga N.R.F., van den Berg C.A.T., Luijten P.R., and Sbrizzi A. A dynamic MR-signal model to capture 3D motion-fields at ultra-high frame-rate. Proceedings of ISMRM 2018, Paris, France, 2018.
- Rueckert D., Sonoda L.I., Hayes C., Hill D.L.G., Leach M.O., and Hawkes D.J. Non-rigid registration using free-form deformations: application to breast MR images. IEEE transactions on Medical Imaging, 18(8):712–721, 1999.
- Fischer B., and Modersitzki J.. Curvature based image registration. Journal of Mathematical Imaging and Vision, 18(1):81–85, 2003.
- Chen M., Lu W., Chen Q., Ruchala K.J., and Olivera G.H. A simple fixed-point approach to invert a deformation field. Medical Physics, 35(1):81–88, 2008.
- Horn B.K.P., and Schunck B.G. Determining optical flow. Artificial intelligence,17(1-3):185–203, 1981.
- Zachiu C., Denis de Senneville B., Moonen C., and Ries M. A framework for the correction of slow physiological drifts during MR-guided HIFU therapies: Proof of concept. Medical Physics, 42(7):4137–4148, 2015.
- Zachiu C., Papadakis N., Ries M., Moonen C., and Denis de Senneville B. An improved optical flow tracking technique for real-time MR-guided beam therapies in moving organs. Physics in Medicine & Biology, 60(23):9003, 2015.
- Gurney P.T., Hargreaves B.A., and Nishimura D.G. Design and analysis of a practical 3D cones trajectory. Magnetic Resonance in Medicine, 55(3):575–582, 2006.
Figures
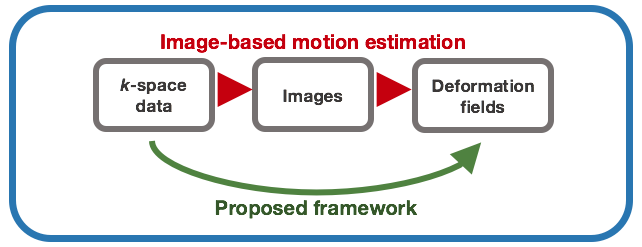
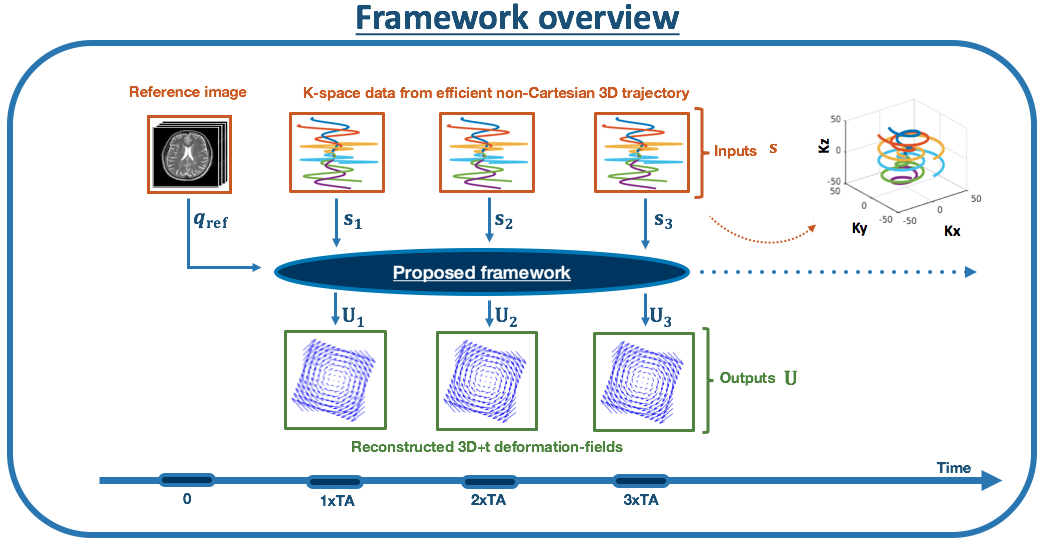
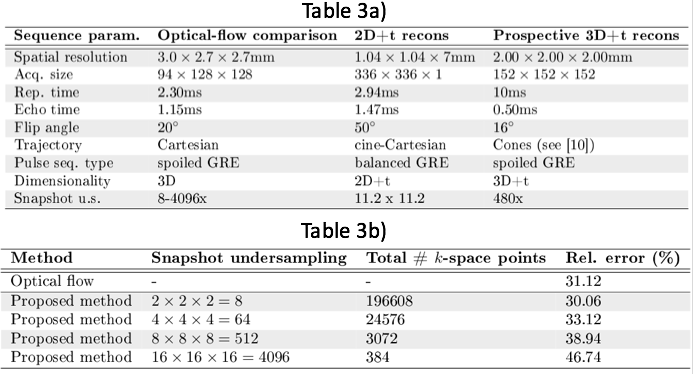
Table 3. (a) Sequence details. (b) Quantitative comparison with image-based motion estimation (optical-flow[7,8,9]). Snapshot k-space data are synthetically generated from one of two fully-sampled 3D abdomen volumes in different respiratory states, and undersampled with factors in Table b) by cropping cubes around the k-space origin. The fully-sampled volumes are registered using optical-flow and the snapshot k-space is used as input to our framework. Reference images are warped using the reconstructed motion-fields, and the relative difference ||a-b||/||a|| with the ground-truth is computed. Our method outperforms optical-flow up to 8x undersampling, and stays within 2% relative difference for up to 64x undersampling.