1176
Extreme MRI: Super-High-Res Dynamic Volumetric MRI from Continuous Non-Gated Acquisition1University of California, Berkeley, Berkeley, CA, United States, 2University of California, San Francisco, San Francisco, CA, United States, 3Stanford University, Stanford, CA, United States
Synopsis
The goal of this work is to recover transient dynamics in 3D dynamic MRI by reconstructing images with near-millimeter spatial resolution and sub-second temporal resolution without gating. This setting poses two major challenges: extreme undersampling and extreme computational/memory cost. To achieve this “extreme MRI”, we propose two innovations: explicit multi-scale low rank matrix factorization to regularize the problem and reduce memory usage, and stochastic optimization to reduce computation. We demonstrate the feasibility of the proposed method in DCE imaging acquired with 3D cones trajectory and lung imaging acquired with 3D UTE radial trajectory.
Introduction
Three-dimensional (3D) dynamic MRI can provide comprehensive information in a single scan and greatly simplify clinical workflow in applications such as dynamic contrast enhanced (DCE) imaging, pulmonary imaging, and flow imaging. However, existing methods often rely on view sharing [1-3], which assumes smooth dynamics, and/or gating-based techniques [4-7], which assume periodic dynamics. Fast transient dynamics are inherently lost in these methods.
The goal of this work is to recover transient dynamics in 3D dynamic MRI by reconstructing images with near millimeter spatial resolution and subsecond temporal resolution without gating. Such temporal resolution naturally makes it robust to respiratory motion and bulk motion.
On the other hand, this setting poses two major challenges: one challenge is that the reconstruction problem is extremely undersampled even with efficient sampling trajectories. Another challenge is the extreme computational and memory cost, as storing the image itself easily approaches hundreds of GBs.
To achieve this “extreme MRI”, we propose two innovations: explicit multi-scale low rank matrix factorization [8] to regularize the problem and reduce memory usage, and stochastic optimization to reduce computation and leverage low memory GPU.
We demonstrate the feasibility of the proposed method in DCE imaging acquired with 3D cones trajectory [9] and lung imaging acquired with 3D UTE radial trajectory [10].
Multiscale Low Rank Matrix Factorization
Low rank models [11-12] are effective at representing spatiotemporal dynamics. Besides making the reconstruction problem well-posed, a seldomly used advantage is that explicit low rank matrix factorization can drastically reduce memory usage by representing dynamic images with a few singular vectors.
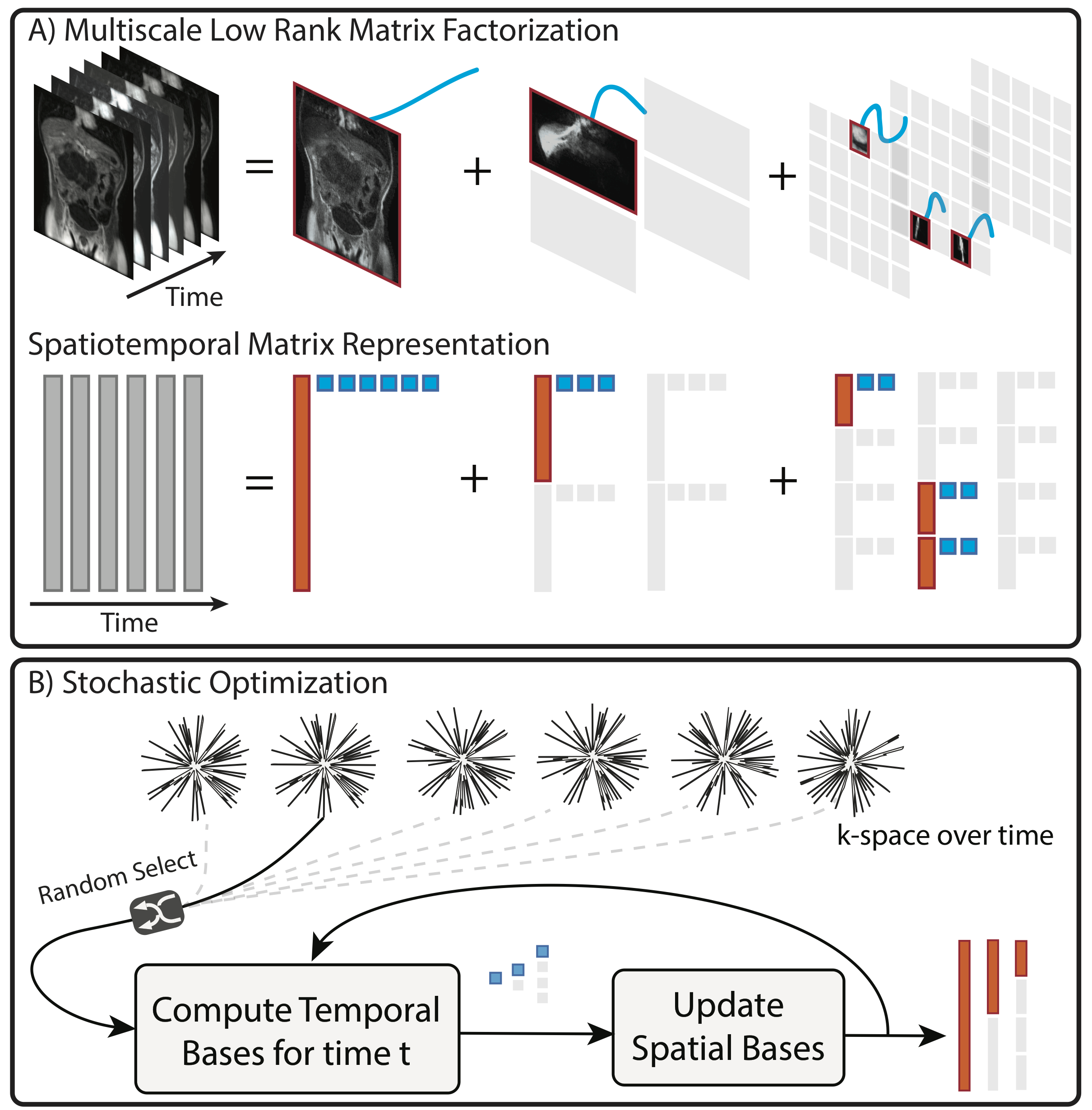
We adopt the multiscale low rank model [8] to obtain an even more compressed representation by incorporating multiscale structure. The multiscale low rank model represents the spatiotemporal matrix as a sum of block-wise low rank matrices with different scales of block sizes, as illustrated in Figure 1A. The model generalizes both locally low rank model [13] and low rank + sparse models [14]. Hence, it retains their advantages.
Concretely, let $$$\mathbf{L}$$$ be the left singular vectors (the spatial bases). And for time $$$t$$$, let $$$\mathbf{R}_t$$$ be the right singular vectors (the temporal bases), $$$\mathcal{A}_t$$$ be the multi-channel sensing model, which includes non-Cartesian imaging with density compensation, and $$$\mathbf{w}_t$$$ be the noise vector. Our forward model for the k-space measurement $$$\mathbf{y}_t$$$ is then given by:$$\mathbf{y}_t=\mathcal{A}_t(\mathbf{L},\mathbf{R}_t)+\mathbf{w}_t.$$We consider the following objective function for reconstruction in which we optimize over $$$\mathbf{L}$$$ and $$$\mathbf{R}$$$:$$\left(\sum_{t=1}^T\|\mathcal{A}_t(\mathbf{L},\mathbf{R}_t)−\mathbf{y}_t\|_2^2\right)+\lambda\left(\|\mathbf{L}\|_F^2+\sum_{t=1}^T\|\mathbf{R}_t\|_F^2\right).$$
Note that we optimize for the singular vectors directly and not the full dynamic images. This allows us to use at least 10x less memory, making reconstruction feasible on local workstations. Despite the objective being non-convex, recent theoretical work [15-17] has shown that under the usual compressed sensing inherence condition, iterative methods on the above objective converge to the global minimum.
Stochastic Optimization
Conventional iterative methods on the above non-Cartesian reconstruction problem still require performing many non-uniform fast Fourier transforms per iteration. To reduce computation and leverage low memory GPU, we propose using stochastic optimization (illustrated in Figure 1B): in each iteration $$$k$$$, we randomly pick a time index $$$\bar{t}\in\{1,\ldots,T\}$$$, and perform alternating minimization stochastically as follows:$$\mathbf{R}_{\bar{t}}^{k+1}=\text{argmin}_{\mathbf{R}_{\bar{t}}}\|\mathcal{A}_{\bar{t}}(\mathbf{L}^k,\mathbf{R}_{\bar{t}})−\mathbf{y}_{\bar{t}}\|_2^2+\lambda\|\mathbf{R}_{\bar{t}}\|_F^2$$$$\mathbf{L}^{k+1}=\text{argmin}_{\mathbf{L}}\alpha\left(T\|\mathcal{A}_{\bar{t}}(\mathbf{L},\mathbf{R}_{\bar{t}}^{k+1})−\mathbf{y}_{\bar{t}}\|_2^2+\lambda\|\mathbf{L}\|_F^2\right)+(1−\alpha)T\|\mathbf{L}−\mathbf{L}^k\|_F^2$$where $$$\alpha$$$ is a step-size. Each sub-problem can be approximately solved using the conjugate gradient algorithm.
Results
Figures 2 and 3 show the reconstruction results on DCE datasets acquired with 3D cones trajectories. Figures 4 and 5 show the reconstruction results on UTE datasets acquired with 3D radial trajectories. The scan parameters are included in the figures. In all of these results, transient dynamics, such as contrast injection and irregular breathing, are captured and visualized nicely. Extreme bulk motion in Figure 3 still creates artifacts as there is very little data consistency but the image quality improves as soon as the body becomes static again.Conclusion
We demonstrated a method that can reconstruct high spatiotemporal resolution 3D dynamic MRI data in the extreme undersampling and extreme computation setting. The method recovers transient dynamics that are inherently lost in existing 3D dynamic image reconstruction methods based on view sharing and/or gating techniques.Acknowledgements
We would like to thank NIH R01 EB009690, R01 EB026136, R01 HL136965, and GE Healthcare for funding support, and Dr. Scott Nagle and Dr. Kevin Johnson for providing UTE datasets. FO would like to thank Dr. Wenwen Jiang for fruitful discussion.References
[1] Hennig J, Scheffler K, Laubenberger J, Strecker R. Time-resolved projection angiography after bolus injection of contrast agent. Magn Reson Med 1997; 3:341-345.
[2] Korosec FR, Frayne R, Grist TM, Mistretta CA. Time-resolved contrast-enhanced 3D MR angiography. Magn Reson Med 1996; 36:345-351.
[3] Saranathan M, Rettmann DW, Hargreaves BA, et al. DIfferential Subsampling with Cartesian Ordering (DISCO); a high spatio-temporal resolution Dixon imaging sequence for multiphasic contrast enhanced abdominal imaging. J Magn Reson Imaging 2012; 35:1484-92.
[4] Feng, L., Axel, L., Chandarana, H., Block, K.T., Sodickson, D.K. and Otazo, R., 2016. XD‐GRASP: golden‐angle radial MRI with reconstruction of extra motion‐state dimensions using compressed sensing. Magnetic resonance in medicine, 75(2), pp.775-788.
[5] Han, F., Zhou, Z., Cao, M., Yang, Y., Sheng, K. and Hu, P., 2017. Respiratory motion‐resolved, self‐gated 4D‐MRI using rotating cartesian k‐space (ROCK). Medical physics, 44(4), pp.1359-1368.
[6] Jiang, W., Ong, F., Johnson, K.M., Nagle, S.K., Hope, T.A., Lustig, M. and Larson, P.E., 2018. Motion robust high resolution 3D free‐breathing pulmonary MRI using dynamic 3D image self‐navigator. Magnetic resonance in medicine, 79(6), pp.2954-2967.
[7] Christodoulou, A.G., Shaw, J.L., Nguyen, C., Yang, Q., Xie, Y., Wang, N. and Li, D., 2018. Magnetic resonance multitasking for motion-resolved quantitative cardiovascular imaging. Nature Biomedical Engineering, 2(4), p.215.
[8] Ong F. and Lustig M., “Beyond Low Rank + Sparse: Multiscale Low Rank Matrix Decomposition,” IEEE J. Sel. Top. Signal Process., vol. 10, no. 4, pp. 672–687, Jun. 2016.
[9] Gurney, P.T., Hargreaves, B.A. and Nishimura, D.G., 2006. Design and analysis of a practical 3D cones trajectory. Magnetic Resonance in Medicine: An Official Journal of the International Society for Magnetic Resonance in Medicine, 55(3), pp.575-582.
[10] Johnson, K.M., Fain, S.B., Schiebler, M.L. and Nagle, S., 2013. Optimized 3D ultrashort echo time pulmonary MRI. Magnetic resonance in medicine, 70(5), pp.1241-1250.
[11] Z. P. Liang, “Spatiotemporal imaging with partially separable functions,” in Proc. IEEE Int. Symp. Biomed. Imag.: From Nano Macro, 2007, pp. 988–991.
[12] Pedersen, H., Kozerke, S., Ringgaard, S., Nehrke, K. and Kim, W.Y., 2009. k‐t PCA: temporally constrained k‐t BLAST reconstruction using principal component analysis. Magnetic resonance in medicine, 62(3), pp.706-716.
[13] Trzasko, J., Manduca, A. and Borisch, E., 2011. Local versus global low-rank promotion in dynamic MRI series reconstruction. In Proc. Int. Symp. Magn. Reson. Med (p. 4371).
[14] R. Otazo, E. Candes, and D. K. Sodickson, “Low-rank plus sparse matrix decomposition for accelerated dynamic MRI with separation of background and dynamic components.” Magn. Reson. Med., vol. 73, no. 3, pp. 1125–1136, Mar. 2015.
[15] Jain, P., Netrapalli, P. and Sanghavi, S., 2013, June. Low-rank matrix completion using alternating minimization. In Proceedings of the forty-fifth annual ACM symposium on Theory of computing (pp. 665-674). ACM.
[16] Ge, R., Lee, J.D. and Ma, T., 2016. Matrix completion has no spurious local minimum. In Advances in Neural Information Processing Systems (pp. 2973-2981).
[17] Hardt, M., 2014, October. Understanding alternating minimization for matrix completion. In Foundations of Computer Science (FOCS), 2014 IEEE 55th Annual Symposium on (pp. 651-660). IEEE.
Figures