0967
Real-time in-vivo tissue temperature and displacement measurements in the brain for MR-guided HIFU treatment and comparison to in-silico focused ultrasound simulation.1IHU Liryc, Electrophysiology and Heart Modeling Institute, Fondation Bordeaux Université, Bordeaux, France, 2Univ. Bordeaux, Centre de recherche Cardio-Thoracique de Bordeaux, U1045, Bordeaux, France, 3INSERM, Centre de recherche Cardio-Thoracique de Bordeaux, U1045, Bordeaux, France, 4Institut Langevin Ondes et Images, ESPCI ParisTech, CNRS 7587, UMRS 979 INSERM, Paris, France, 5ICM, Inserm U 1127, CNRS UMR 7225, Sorbonne Universités, Paris, France, 6UPMC Université Paris 06 UMR S 1127, Institut du Cerveau et de la Moelle épinière, Paris, France
Synopsis
MR-guided High Intensity Focus Ultrasound is an appealing technology in neurosurgery. For such application, accurate targeting and monitoring are crucial. A recent sequence allowing simultaneous measurements of temperature and displacement measurements is used to identify in real-time both the focal point by Acoustic Radiation Force Intensity (ARFI) and verify the absence of heating during ARFI sonication. The method has been evaluated in vivo in a non-human primate under anesthesia with a single-element transducer. A comparison with in-silico focused ultrasound simulation is also provided.
Purpose
MR-guided High Intensity Focus Ultrasound (MRgHIFU) is an appealing technology in neurosurgery that has grown in popularity with the recent success of essential tremor therapy [1] and for other emerging application such as the treatment Parkinson's disease. More recently, neuromodulation by transcranial ultrasonic stimulation (TUS) came out and expanded the perspectives of transcranial stimulation by offering non-invasive deep targeting. For both HIFU and TUS applications, accurate targeting and monitoring are crucial. Acoustic Radiation Force Intensity (ARFI) is a promising sequence to identify the focal point location before starting the therapy [2] and could also be combined with simultaneous temperature mapping [3-5] for safety assessment. In this work, a rapid acquisition sequence allowing simultaneous measurements of temperature and displacement is used to visualize in real-time both the focal point by ARFI and potential heating of brain tissues near the skull during ARFI sonication. The method has been evaluated in vivo in a non-human primate under anesthesia with a single-element transducer. A comparison with in-silico focused ultrasound simulation is also provided.Methods
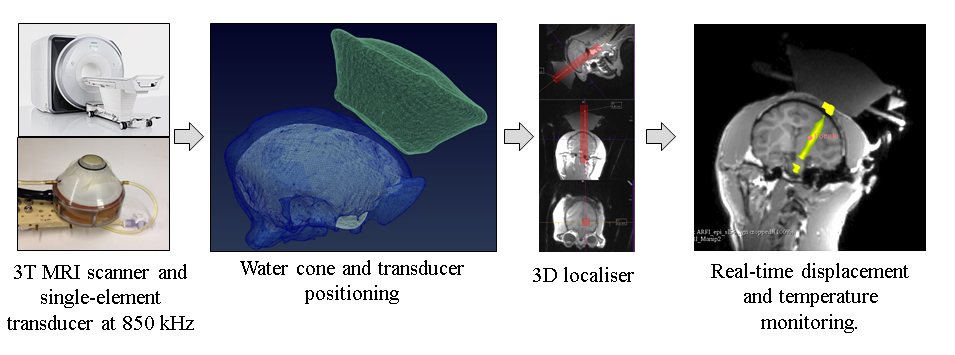
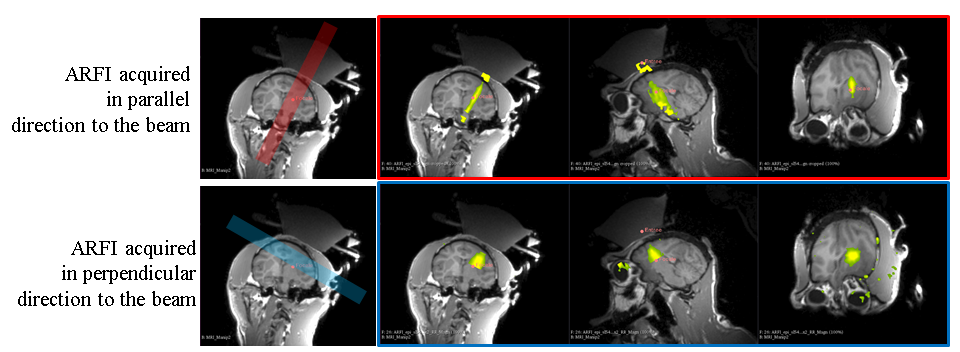
Acquisition was performed at 3.0T on a clinical imaging system (MAGNETOM Prisma, Siemens Healthcare, Erlangen, Germany) using a modified single-shot gradient echo EPI with bipolar motion-sensitive encoding gradient [3] (duration 5 ms, amplitude = 54 mT/m). Acquisition parameters were FA = 60°, GRAPPA acceleration of 2, 6/8 partial Fourier, bandwidth = 1565 Hz/pixel. 4 slices were acquired sequentially in perpendicular or parallel direction to the beam (fig. 1) at 1 Hz update frequency using two pad coils (8 channels in total). Other acquisition parameters were TE/TR=29 ms/75 ms. FOV=196x196 mm2, leading to a spatial resolution of 2 mm3 isotropic.
Image reconstruction and post-processing were performed in real-time in the Gadgetron framework [6]. Magnitude and phase images were then transferred by TCP/IP to Thermoguide™ (Image Guided Therapy SA, Pessac, France) for online computation and display of temperature images and displacement maps. Ultrasound device: A single-element transducer [7] (H115, Sonic Concepts, Bothel, USA) was operated at 850 kHz (fig. 1). For each slice, the displacement was generated by a 7 ms HIFU shot at 70 Wac (200 V peak to peak applied to the transducer) synchronized on one lobe of the motion encoding gradient of the MRI sequence.
Animal Preparation: The protocol was approved by the local Animal Research Ethics Committee “Darwin” according to the European rules for animal experimentation. In vivo validation was performed on primate near the caudate nucleus (Fig. 1). The animal was assisted for ventilation and maintained under general anesthesia with isoflurane (0.8%).
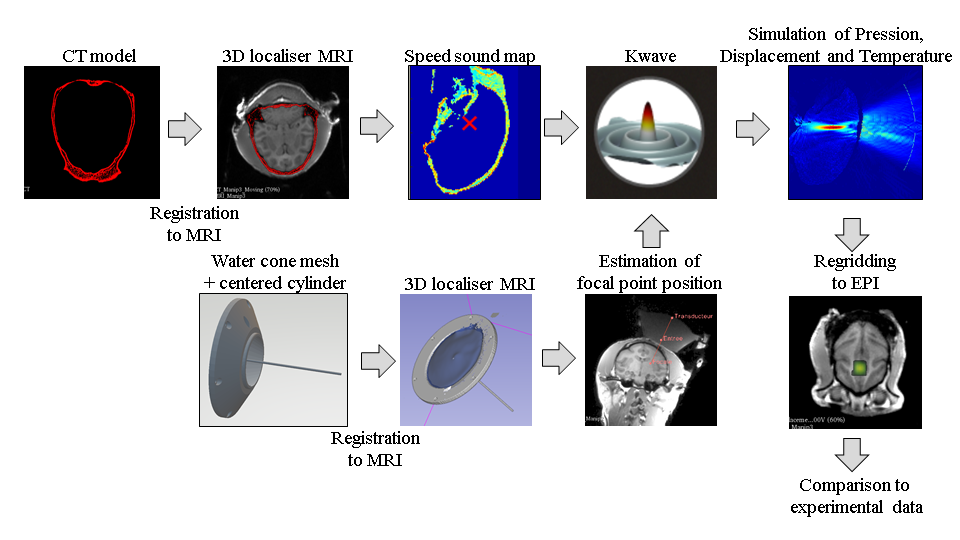
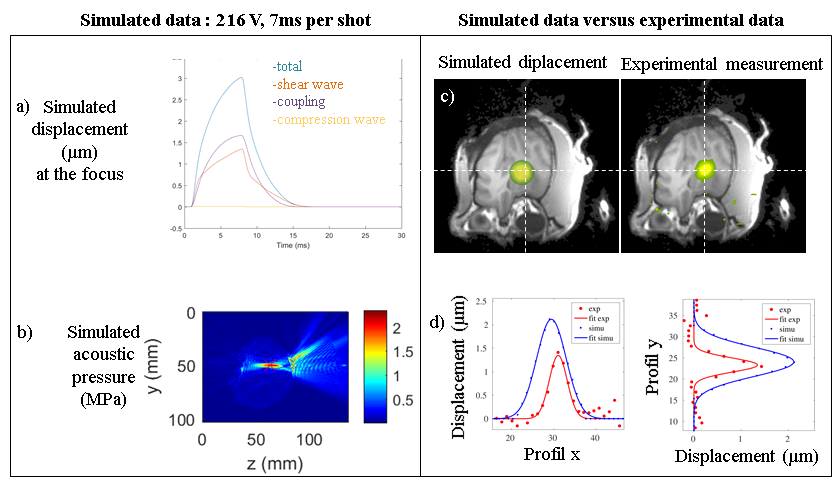
Ultrasound simulation: The propagation of focused ultrasound was simulated (fig. 2) in an entire monkey head using a k-space pseudospectral method-based solver, k-Wave [8]. 3D maps of the skull were extracted from a dry monkey CT (0.26 mm3 resolution). The transducer was modelled as a spherical section. A 150 μs long pulse was simulated at the frequency of 850 kHz. The simulations were first performed in pure water and scaled with the amplitude measured experimentally. We used a linear relationship between the Hounsfield Units (HU) from the CT scan and sound speed and density. The power law model for attenuation was $$$abs=\alpha \phi^\beta$$$ where $$$\alpha $$$ was the absorption coefficient and the porosity $$$\phi $$$ was defined by $$$ \phi={(\rho_{max}-\rho)}/{(\rho_{max}-\rho_{water})}$$$ in the skull [7]. Simulated data were compared to experimental data after regridding to the EPI resolution.
Results
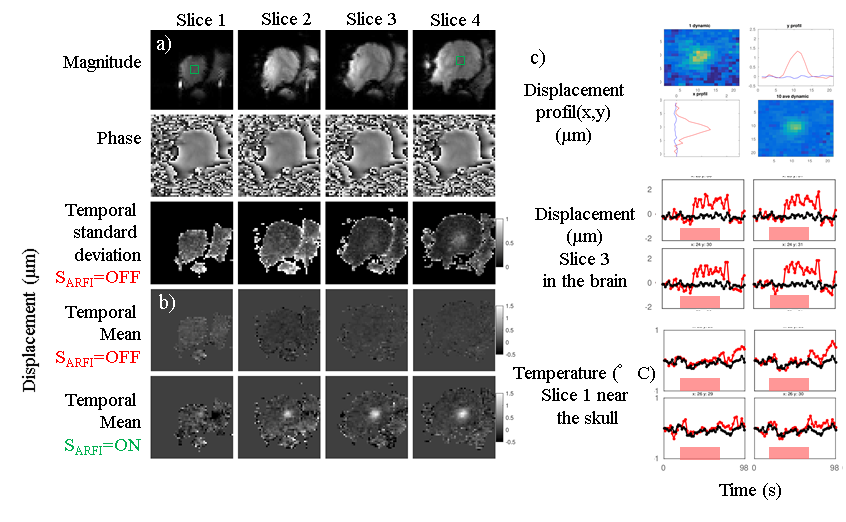
An accurate phase reconstruction was obtained. A standard deviation (uncertainty) below 0.2 °C for temperature mapping and 0.4 µm for tissue displacement (Fig. 3) was found. Estimation of the focal point location was confirmed by the visualization of an ARFI spot (5*5 voxels) on all adjacent slices. Displacement profil along x and y shows a gaussian shape compared to baseline. Maximum displacement was 3 µm with average value around 1.5 µm (Fig. 3). Temperature elevations were observed near the skull (Fig. 3). A total of 25 acquisitions in 3 different experiments were performed with different peak to peak tensions driving the ultrasound transducer. Displacement and temperature were successfully acquired allowing a clear visualization of the beam (Fig 4.). Location and maximal amplitude of the simulated displacement show a good agreement with experimental data (Fig. 5).Conclusions
The combination of thermal rise and displacement measurements allows to identify both the focal point location and the temperature changes. The current rapid, multi-slice acquisition and real-time implementation of image visualization is compatible with clinical practice and could help in defining safety operation marging for clinical applications of non-invasive brain stimulation. Simulations were in reasonable agreement with experimental data and may thus be used for planning the transducer position and estimate the order of magnitude of the local displacement in the brain.Acknowledgements
This work received the financial support from the French National Investments for the Future Programs Laboratory of Excellence ANR-10-LABX-57 (TRAIL) and the research programs France Life Imaging ANR-11-INBS-0006 (FLI).References
1. Elias WJ, Lipsman N, Ondo WG, Ghanouni P, Kim YG, Lee W, et al. A Randomized Trial of Focused Ultrasound Thalamotomy for Essential Tremor. N Engl J Med. 2016;375(8):730-9.
2. Marsac L, Chauvet D, Larrat B, Pernot M, Robert B, Fink M, et al. MR-guided adaptive focusing of therapeutic ultrasound beams in the human head. Med Phys. 2012;39(2):1141-9.
3. Bour P, Marquet F, Ozenne V, Toupin S, Dumont E, Aubry JF, et al. Real-time monitoring of tissue displacement and temperature changes during MR-guided high intensity focused ultrasound. Magn Reson Med. 2017;78(5):1911-21.
4. Auboiroux V, Viallon M, Roland J, Hyacinthe JN, Petrusca L, Morel DR, et al. ARFI-prepared MRgHIFU in liver: simultaneous mapping of ARFI-displacement and temperature elevation, using a fast GRE-EPI sequence. Magn Reson Med. 2012;68(3):932-46.
5. de Bever JT, Odeen H, Hofstetter LW, Parker DL. Simultaneous MR thermometry and acoustic radiation force imaging using interleaved acquisition. Magn Reson Med. 2018;79(3):1515-24.
6. Hansen
MS, Sorensen TS. Gadgetron: an open source framework for medical image
reconstruction. Magn Reson Med. 2013;69(6):1768-76.
7. Constans C, Deffieux T, Pouget P, Tanter M, Aubry JF. A 200-1380-kHz Quadrifrequency Focused Ultrasound Transducer for Neurostimulation in Rodents and Primates: Transcranial In Vitro Calibration and Numerical Study of the Influence of Skull Cavity. IEEE Trans Ultrason Ferroelectr Freq Control. 2017;64(4):717-24.
8. Cox BT, Kara S, Arridge SR, Beard PC. k-space propagation models for acoustically heterogeneous media: application to biomedical photoacoustics. J Acoust Soc Am. 2007;121(6):3453-64.
Figures