0661
Dynamic MRI using Model-based deep learning and SToRM priors: MoDL-SToRM1University of Iowa, Iowa city, IA, United States
Synopsis
We introduce a novel framework to combine deep-learned priors along with complementary image regularization penalties to reconstruct free breathing & ungated cardiac MRI data from highly undersampled multi-channel measurements. Image recovery is formulated as an optimization problem, where the cost function is the sum of data consistency term, convolutional neural network (CNN) denoising prior, and SmooThness regularization on manifolds (SToRM) prior that exploits the manifold structure of images in the dataset. Our results show the benefit in combining deep learned CNN priors with complementary image regularization penalties.
Background
The recent smoothness regularization on manifold (SToRM) [1] approach provides an implicit binning alternative to current self-gated cardiac MRI schemes; and provides improved reconstruction of phases that are poorly sampled, especially in subjects with irregular breathing patterns. The SToRM framework estimates patient-specific manifold priors from k-space navigators. A challenge with SToRM is the relatively high acquisition time (42s/slice). We propose to combine the patient-specific SToRM regularization with population-generic deep learning priors to further reduce the scan time of SToRM. The combination of self-learned and exemplar-learned priors is facilitated by the model-based deep learning (MoDL) [2] framework, which formulates the image reconstruction as an optimization problem.Methods
Acquisition of prospective data: Four volunteers instructed to breath normally were scanned on the Siemens Aera scanner to generate prospectively undersampled free-breathing ungated radial dataset with a FLASH sequence and a 32-channel cardiac array. The scan parameters were TR/TE = 4.2/2.2ms, number of slices = 5, slice thickness = 5 mm, FOV = 300mm, spatial resolution = 1.17 mm. A temporal resolution of 42ms was obtained by binning 10 consecutive lines of k-space per frame, including 4 uniform navigator lines. Each slice comprised of 10000 radial lines of the k-space binned to 1000 frames, resulting in an acquisition time of 42s. The raw k-space data was interpolated to a Cartesian grid and 7 virtual coils were approximated out of the initial 32 using a SVD based coil-compression technique. The SToRM [1] reconstructed images were used as the reference to train the deep networks. We use subsets of the above data (2000 spokes/200 frames/8.4s acquisition time) to demonstrate the utility of the proposed scheme.
Simulated data: We generated simulated free breathing datasets by extracting three cardiac cycles of a SToRM-1000 reconstruction and deforming (using Bspline interpolation) them in space and time to generate six (four training & two testing) synthetic datasets and were retrospectively undersampled using six golden angle radial lines & four uniform radial navigators.
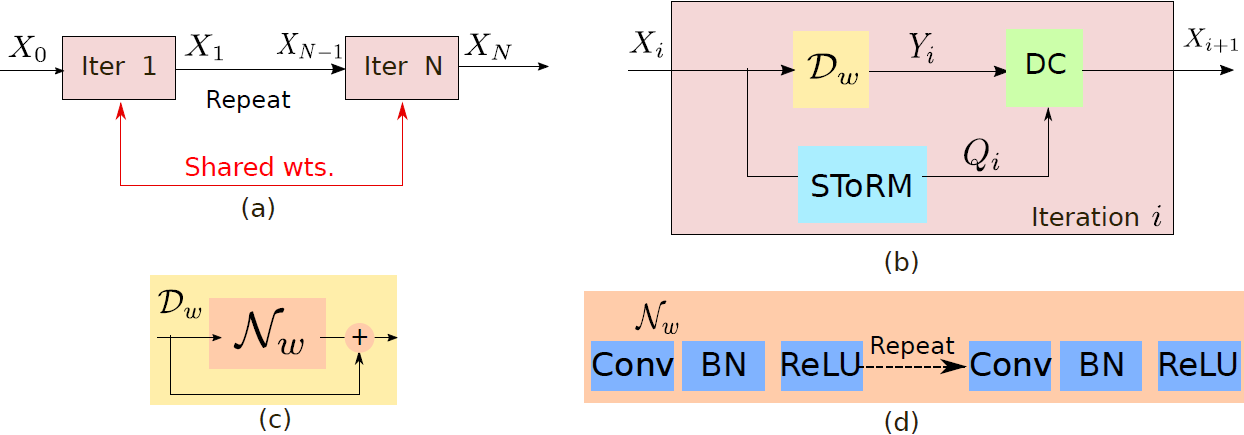
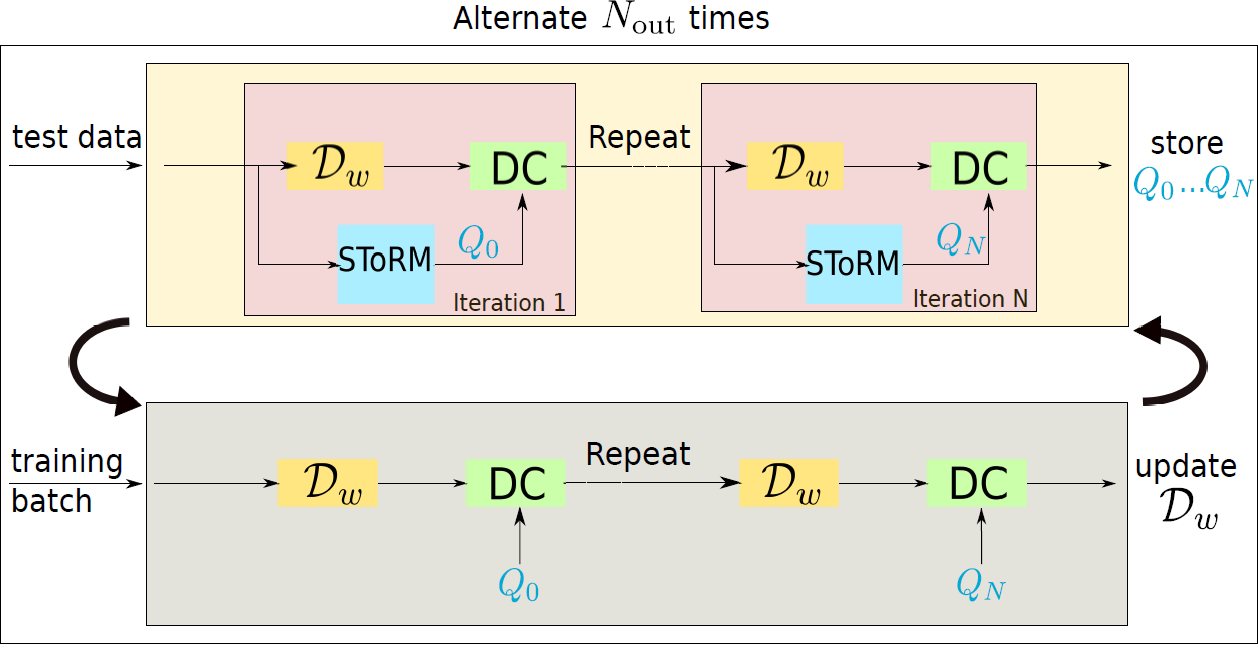
Optimization problem: The MoDL-SToRM framework uses a cost function that is the sum of data consistency term, SToRM prior, and a deep learned prior; we formulate our reconstruction as the minimization of the objective: $$\mathcal C(\mathbf X)= \underbrace{\|\mathcal A(\mathbf X)-\mathbf B\|_2^2}_{\mbox{data consistency}} ~+~ \frac{\lambda_{\rm {CNN}}}2 \underbrace{\|\mathcal N_{\mathbf w}(\mathbf X)\|^2}_{\mbox{CNN prior}} +\qquad\frac{\lambda_{\rm {SToRM}}}2 \underbrace{{\rm tr}\left(\mathbf X^T\mathbf L\mathbf X\right)}_{\mbox{SToRM prior}}. $$ Here, $$$\mathcal A$$$ is the multi-channel Fourier sampling operator, which includes coil sensitivity weighting. $$$\mathcal N_{\rm w}$$$ is a 3-D CNN based estimator that estimates the noise and alias patterns in the dataset from local neighborhoods of the 2D+time dataset; $$$\|\mathcal N_{\mathbf w}(\mathbf x)\|^2$$$ is a measure of the alias/noise contribution in the dataset $$$\mathbf X$$$ [2]. The denoised signal can be estimated from the data $$$\mathbf X$$$ as $$$\mathcal D_{\mathbf w} (\mathbf X) = \left(\mathcal I -\mathcal N_{\rm w}\right)(\mathbf X) = \mathbf X-\mathcal N_{\mathbf w}(\mathbf X).$$$ The unrolling of the iterative algorithm provides a deep architecture, which is trained using exemplar data in an end to end fashion. The iterative model that solves minimizes the above is shown in Fig 1 and the training strategy is explained in Fig 2. Here $$$\lambda_{\rm {CNN}}, \lambda_{\rm {SToRM}}$$$ and $$$\mathcal D_{\mathbf w}$$$ are trainable parameters.
Training data: The data was acquired on four volunteers, each but one with two different views–short axis and four chambers, resulting in total seven datasets. We used the data from four datasets for training and other three for testing. We extracted 3 non-overlapping groups of 200 frames each from the above datasets, which were used for training. The SToRM reconstruction of the datasets from 1000 frames are considered as reference data. $$$\mathbf X_0 = \arg \min_{\mathbf X} \|\mathcal A(\mathbf X)-\mathbf B\|_2^2 + \frac{\eta}2~{\rm tr}\left(\mathbf X^T\mathbf L\mathbf X\right) $$$, with $$$\eta$$$ chosen manually. The input to the network was $$$\mathbf X_0 $$$, the solution to above cost, computed with reduced number of frames (200), whereas for MoDL training (competing method), $$$\mathbf X_0=\mathcal A^* \mathbf B$$$.
Results
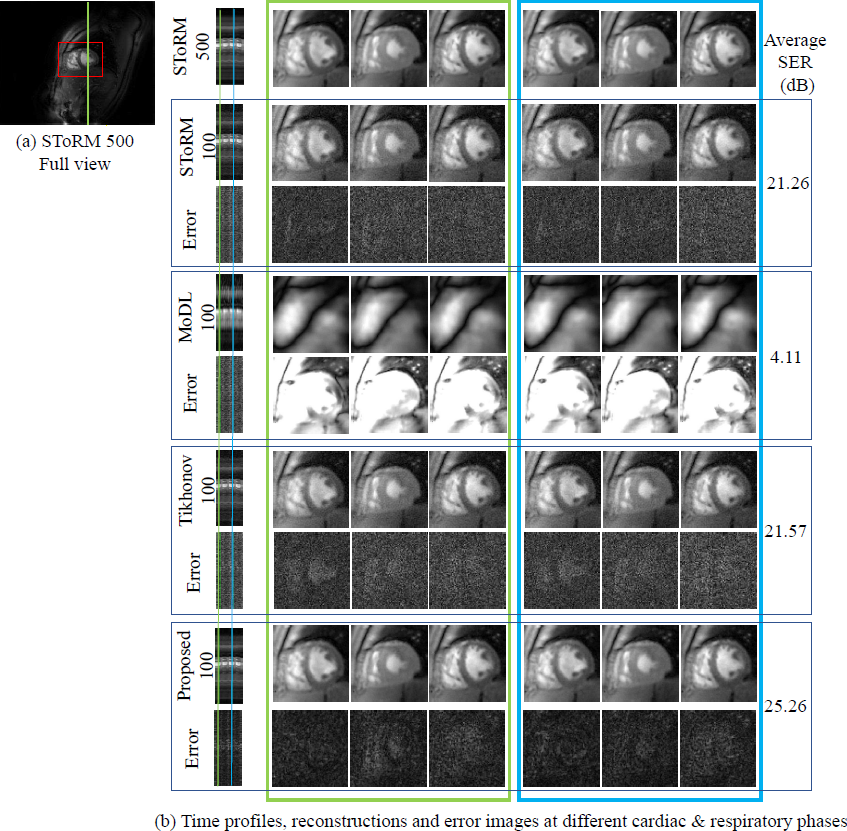
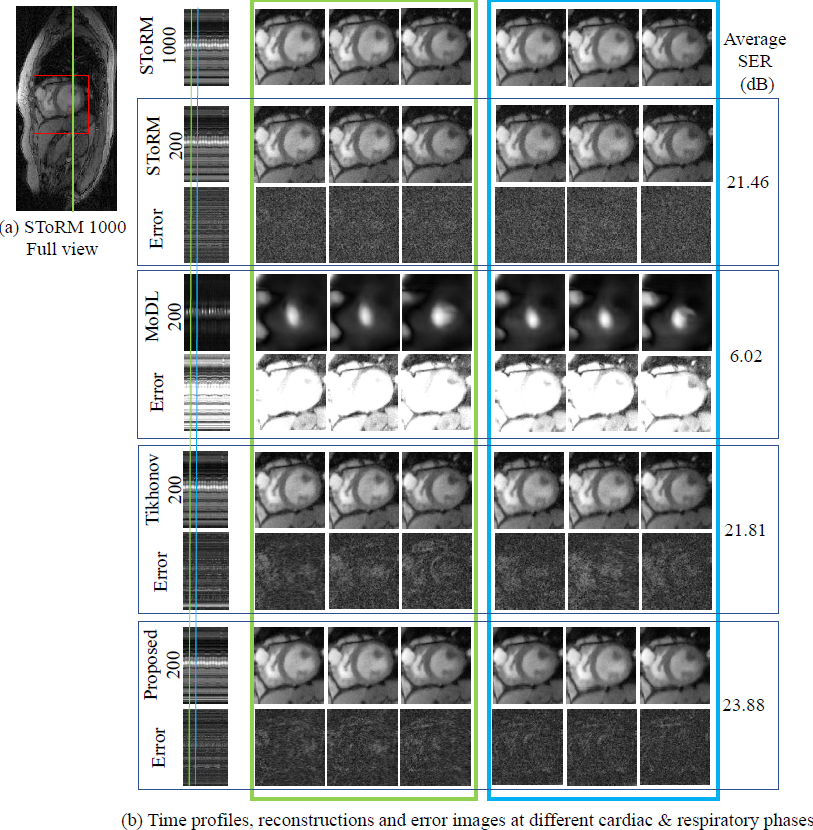
The reference for reconstruction as assumed to be the SToRM reconstruction from 42s of data or 1000 frames. The reconstruction results with the simulated free breathing pattern and the prospective test data are shown in Fig 3 and 4 respectively. The proposed MoDL-SToRM results show least structured error when compared to the reference reconstruction, over other competing methods such as, 200 frame reconstruction with i) SToRM, ii) MoDL or iii) Tikhonov-SToRM (spatial smoothing prior on top of SToRM).Discussion and conclusion
Our results show the benefits of combining the deep-learned priors with patient specific SToRM priors to recovering free-breathing, cardiac time series, acquired using a scan time of 8.4s as compared to SToRM reconstruction with 42s of acquisition.Acknowledgements
No acknowledgement found.References
[1] Poddar S and Jacob M. Dynamic mri using smoothness regularization on manifolds (storm). IEEE transactions on medical imaging, 2016; 35:1106–1115
[2] Aggarwal HK, Mani MP, and Jacob M. Modl: Model based deep learning architecture for inverse problems. IEEE Transactions on Medical Imaging, 2018; pages 1–1. ISSN 0278-0062.10.1109/TMI.2018.2865356
[3] Schlemper J, Caballero J, Hajnal JV, Price AN, and Rueckert D. A deep cascade of convolutional neural networks for dynamic mr image reconstruction. IEEE transactions on Medical Imaging, 2018; 37:491–503
Figures