0274
MRI with Sub-Millisecond Temporal Resolution: An Example Employing Spatially Resolved Eddy Current Characterization1Center for MR Research, University of Illinois at Chicago, Chicago, IL, United States, 2Department of Bioengineering, University of Illinois at Chicago, Chicago, IL, United States, 3Department of Radiology and Neurosurgery, University of Illinois at Chicago, Chicago, IL, United States
Synopsis
Increasing the temporal resolution has been a major motivation for MRI technical development. Despite considerable progress, the presently achievable temporal resolution of MRI is limited to tens of milliseconds. We report a novel MRI technique, which we call Sub-Millisecond Imaging of cycLic Event (SMILE), that is capable of capturing periodic processes with sub-millisecond resolution. This technique is demonstrated by employing an example of characterization of eddy currents with short time constants.
Introduction
Increasing the temporal resolution has been a major motivation for MRI technical development. Time-efficient strategies of k-space traversal, coupled with advanced image reconstruction1–4 and RF coil technologies5, have advanced temporal resolution to the order of tens of milliseconds, making it possible to perform real-time imaging to capture many rapid dynamic processes. Despite these exciting developments, a number of important physical and biological processes on a temporal scale of milliseconds or sub-milliseconds remain inaccessible by MRI. Herein, we report a novel MRI technique, which we call Sub-Millisecond Imaging of cycLic Event (SMILE), that offers a temporal resolution of sub-millisecond to capture periodic processes, and demonstrate its technical feasibility by employing an example of spatially resolved eddy current characterization with short time constants.Materials and Methods
Theory:
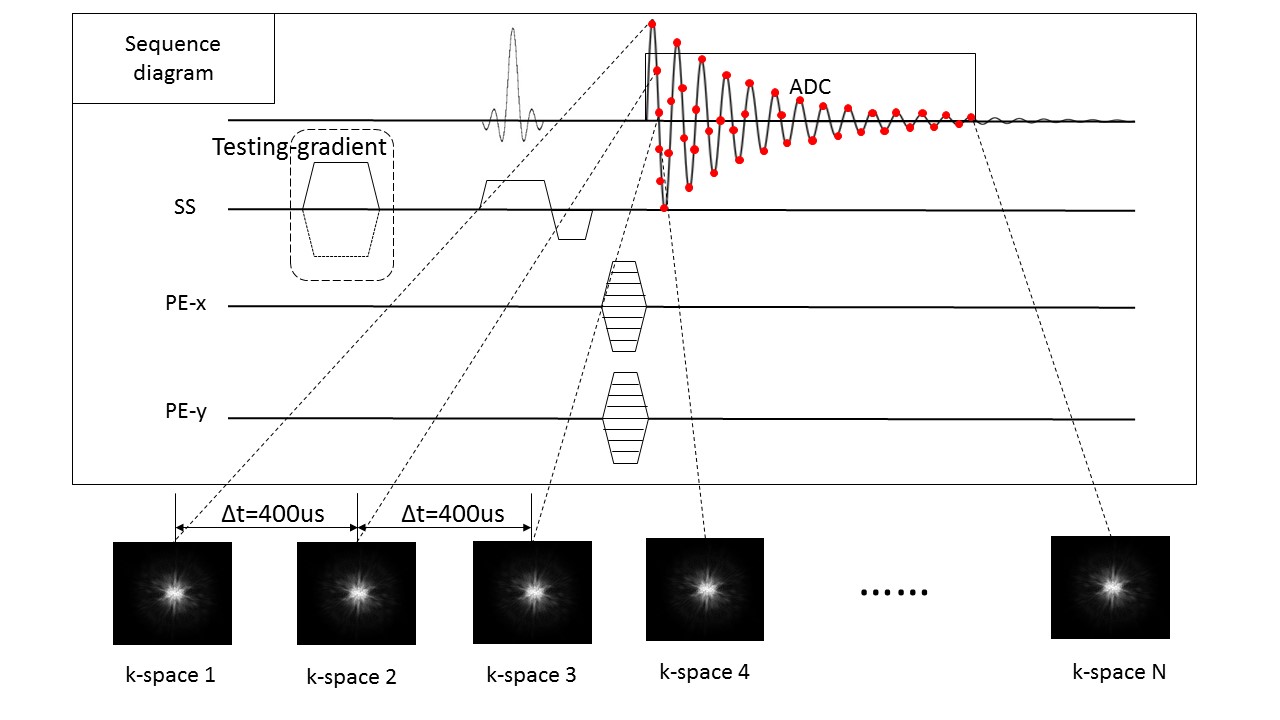
SMILE is developed to capture a cyclic dynamic event such as cardiac motion, neuronal current, and hemodynamic response. Unlike conventional MRI in which an FID or a spin-echo signal is used to encode spatial or chemical shift information, SMILE uses the signal to resolve a dynamic event with a temporal resolution determined by the dwell time. In SMILE, spatial localization is accomplished by the combination of slice-selection and phase-encoding (for 2D) or by phase-encoding only (for 3D) via a synchronized acquisition with the cyclic event. In doing so, each point in the FID or spin-echo signal corresponds to an image, and a collection of all points over the course of an FID or spin-echo signal provides a time-resolved description of the cyclic event, as shown in Fig.1. With SMILE, the temporal resolution of MRI is no longer determined by how fast k-space is traversed (i.e., the scan time or TR), but instead by the dwell time (e.g., 40μs with a receiver bandwidth of ±12.5kHz). Due to the reliance on phase-encoding for spatial encoding, the scan time in SMILE can be long. However, this problem can be mitigated using advanced k-space sampling techniques such as compressed sensing (CS)4.
SMILE for Eddy Current Characterization:
As an example, the SMILE technique was applied to characterizing eddy currents on a 3T commercial MRI scanner. The short time constant (τ) eddy currents are difficult to measure because a temporal resolution of sub-millisecond or higher is typically required. SMILE can uniquely meet this challenge. Using SMILE, a pulse sequence was designed for characterizing B0 and cross-term eddy currents with short time constants (Fig. 1). The pulse sequence was applied twice with the opposite testing gradient polarities6,7. The phase difference between the two acquisitions can be expressed as: $$\phi(t)=\frac{\phi_{1}(t)-\phi_{2}(t)}{2}=\gamma\int_{0}^{t} B_{e}(\overrightarrow{x},t^{'})dt^{'}. [1]$$ The fast-changing phase evolution caused by eddy currents was measured using the SMILE sequence illustrated in Fig. 1.
Data Acquisition:
The SMILE sequence in Fig. 1 was implemented on a 3T GE MR 750 scanner. Experiments were performed on a spherical water phantom by disabling manufacturer’s eddy current compensation for the B0-term and cross-terms (i.e., y-to-x, and y-to-z linear eddy currents) to enable eddy current characterization. The SMILE sequence parameters were: TR/TE=200/2.8ms, slice thickness=5mm, FOV=12cm×12cm, matrix size=64×64, bandwidth=±1.25KHz, number of points=256, and the total acquisition time=13.6min. To reduce the scan time, CS acquisition with an acceleration factor of five was applied in a separate experiment without changing any other parameters, resulting in a scan time of 2.7min.
Image Analysis:
Time-resolved phase difference maps were computed based on Eq. [1]. At each pixel, the eddy current time constant was estimated from the exponential time evolution of the signal phase.
Results
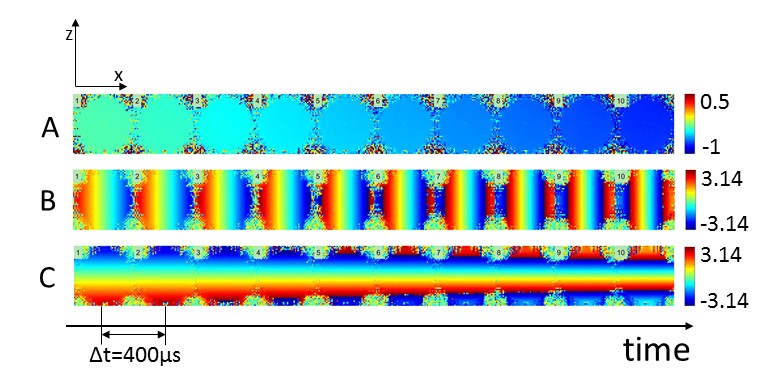
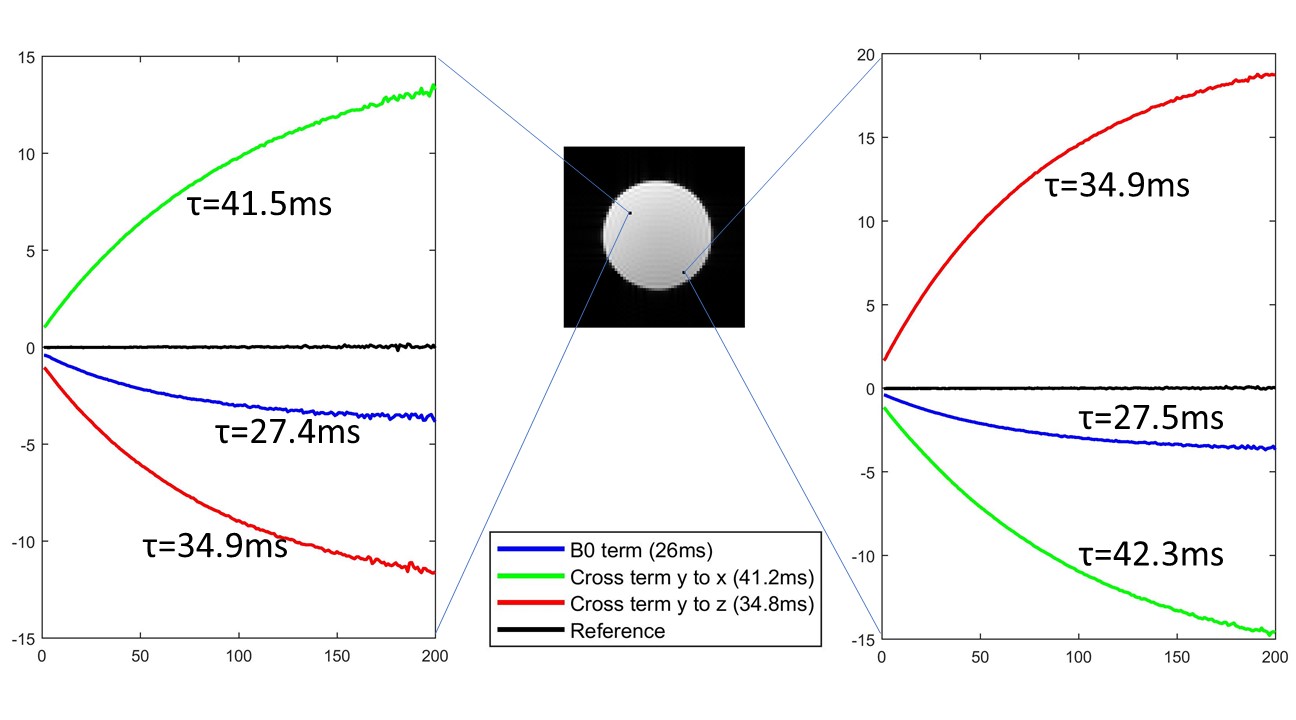
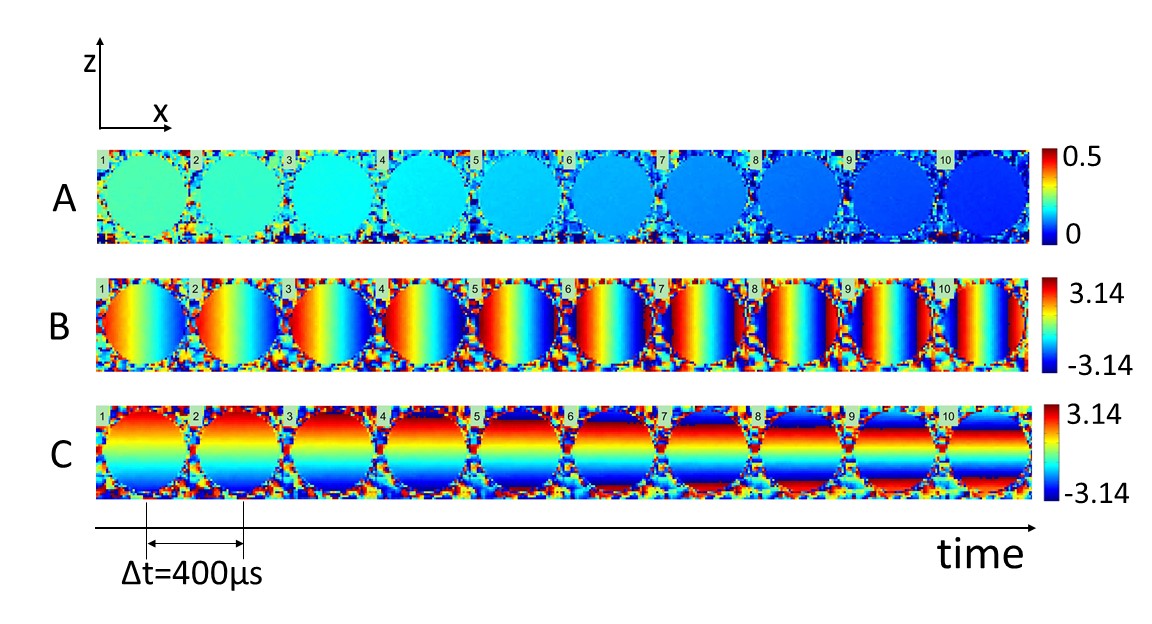
Three time series of phase maps are shown in Fig. 2, each with a temporal resolution of 400μs. These time series correspond to the B0 eddy currents, y-to-x, and y-to-z cross-term eddy currents, as explained in the caption. The time course evolutions from two randomly selected points in the phase map are displayed in Fig. 3, where the exponential variation is clearly seen. The time constants measured at different locations exhibited excellent consistency. The phase difference maps from the CS acquisition showed similar results, but with a significantly reduced scan time (Fig. 4).Discussion and Conclusion
By characterizing the spatially resolved eddy currents, we have demonstrated the capability of SMILE in capturing fast cyclic event with sub-millisecond temporal resolution. An even higher temporal resolution can be achieved with a broader receiver bandwidth. The principle demonstrated in this specific example is generalizable to capturing other fast cyclic events.Acknowledgements
This work was supported in part by NIH 1S10RR028898. We thank Michael Flannery and Hagai Ganin for technical assistance.References
- Sodickson, D. K. and Manning, W. J. Simultaneous acquisition of spatial harmonics (SMASH): Fast imaging with radiofrequency coil arrays. Magn. Reson. Med. 38, 591–603 (1997).
- Pruessmann, K. P., Weiger, M., Scheidegger, M. B. and Boesiger, P. SENSE: sensitivity encoding for fast MRI. Magn. Reson. Med. 42, 952–962 (1999).
- Griswold, M. A., Jakob, P. M., Heidemann, R. M., Nittka, M., Jellus, V., Wang, J., Kiefer, B. and Haase, A. Generalized autocalibrating partially parallel acquisitions (GRAPPA). Magn. Reson. Med. 47, 1202–1210 (2002).
- Lustig, M., Donoho, D. and Pauly, J. M. Sparse MRI: The application of compressed sensing for rapid MR imaging. Magn. Reson. Med. 58, 1182–1195 (2007).
- Wright, S. M. and McDougall, M. P. Single echo acquisition MRI using RF encoding. NMR Biomed. 22, 982–993 (2009).
- Jehenson, P., Westphal, M. and Schuff, N. Analytical method for the compensation of eddy-current effects induced by pulsed magnetic field gradients in NMR systems. J. Magn. Reson. 1969 90, 264–278 (1990).
- Zhou, X. J., Maier, J. and Reynolds, H. Method to reduce eddy current effects in diffusion-weighted echo planar imaging. (1999).
Figures