0229
Model based joint B0 and image estimation framework for dynamic field mapping and signal pile-up correction in prostate diffusion MRI1University College London, London, United Kingdom, 2Canon Medical Research USA, Cleveland, OH, United States
Synopsis
Prostate diffusion MRI is recognized as a potential biomarker for tumour detection but currently it is unusable in some patients due to significant distortions. We proposed a novel model based joint image and B0 reconstruction framework that can correct these distortions by using data acquired from opposite phase encoding gradient directions. Using sampling time shift between the two acquisitions, the proposed method is robust against any dynamic changes in the off resonance effects in the prostate-rectal air region.
Introduction
Prostate diffusion MRI scans are used as a potential biomarker for tumour detection. However, currently these are unusable in some patients due to distortions including signal pile-up and signal drop-out in the images. These distortions occur due to difference in susceptibility values at prostate and rectal-air interface.Techniques have been proposed that can correct for geometric distortions using a B0 map acquired in separate scan that measures the off resonance frequency offset at different spatial locations. However,distortion correction using a previously acquired B0 map may fail in case of 1)change in size of rectal air region across time,2) physiological motion,3)scanner frequency drift and 4) B0 map errors in low SNR regions.In this work,using a set of single shot EPI data acquired in blip-up and blip-down phase encoding directions with a k-space sampling time shift between the two acquisitions,model based joint image and B0 estimation framework is proposed that can account for any dynamic changes in the off resonance effects between B0 and EPI scans; and can compensate for geometric distortions in the reconstructed EPI images.Results are presented for simulated data generated with realistic prostate B0 maps and timings corresponding to a diffusion EPI acquisition.Method
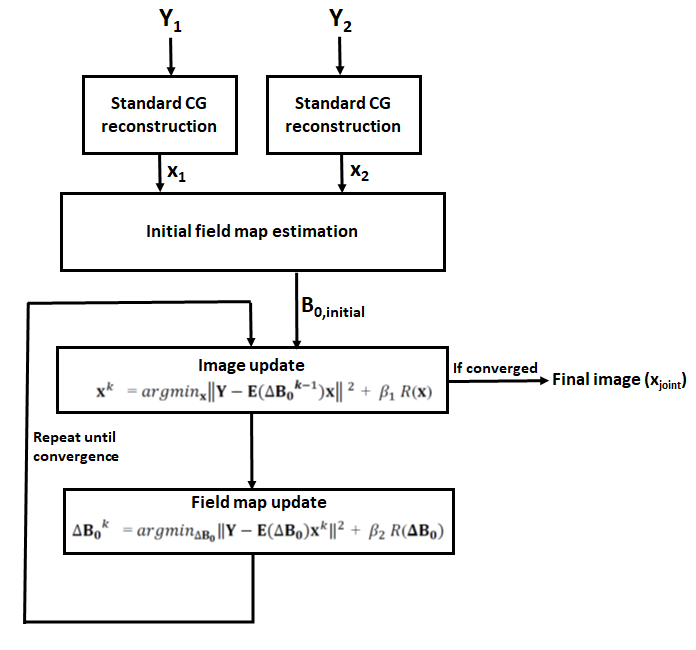
The proposed framework (Fig.1) acquires two EPI data sets (blip-up and blip-down) in opposite phase encoding gradient directions with a constant time shift (Tdiff) between acquisition of k-samples in the two scans.Starting from an initial B0 field estimated from reconstructed images in the two scans,a joint estimation framework is proposed that can estimate both corrected EPI image and corrected field maps.Let Y1 and Y2 be the k-space for blip-up and blip-down EPI scans, respectively. Mathematically, we can write1,2:
\[\mathbf{Y_1} (k,l)=∑_{n=0}^{N-1}∑_{m=0}^{M-1}\mathbf{x}(m,n) e^{-i2\pi(mk/M+nl/N)} e^{-i2\pi(\mathbf{ΔB_0} (m,n).t_1 (k,l))} \]
\[\mathbf{Y_2} (k,l)=∑_{n=0}^{N-1}∑_{m=0}^{M-1}\mathbf{x}(m,n) e^{-i2\pi(mk/M+nl/N)} e^{-i2\pi(\mathbf{ΔB_0} (m,n).t_2 (k,l))} \]
\[\quad \quad \quad \quad \quad \quad \qquad \qquad \it{Eq (1)} \]
where m,n are image coordinate indices, M,N are image dimensions, k,l are k-space coordinate indices, ΔB0 is the B0 field in Hz; t1(k,l) and t2(k,l) are the acquisition times of location (k,l) in k-space for blip-up and blip-down scans, respectively such that t2(k,l) = -t1(k,l) +Tdiff, where Tdiff is a constant time shift, the value is set in range of 1-3 msec. For spin echo sequence, time shift Tdiff can be achieved by shifting the timing of the refocussing pulse in the sequence development. Eq (1) can be summarized as Y1=E1(ΔB0)x and Y2=E2(ΔB0)x, where E1 and E2 summarize the encoding operators for blip-up and blip-down scans, respectively. The data from both phase encoding directions can be combined into a single formulation in Eq(2) by setting Y=[Y1 Y2]T and E=[E1 E2]T in Eq (1).
\[ \mathbf{Y=E(ΔB_0)x} \quad \quad \it{Eq (2)} \]
The proposed joint image and B0 field estimation framework can be summarized as:
\[ arg \it{min}_{\bf{x,ΔB_0}} \bf{Ψ(x, ΔB_0)} \quad \it{Eq (3)} \] where \[ \bf{Ψ(x, ΔB_0)} = \parallel\bf{Y-E(ΔB_0)x}\parallel^2+ β_1\it{R}(\bf{ x}) + β_2\it{R}(\bf{ΔB_0} ) \]where R(x)and R(ΔB0) are quadratic regularization terms ||Dx||2 and ||DΔB0||2 respectively, D being the first order finite difference operator; β1,β2 are regularization weights.
The above formulation is solved using alternating minimization scheme3,4.The image update in the kth iteration is estimated using a previous field map estimate ΔB0k-1:
\[ {\bf{x}}^{k}=arg \it{min}_{\bf{x}}\parallel\bf{Y}-\bf{E}({\bf{ΔB_0}}^{k-1})\bf{x}\parallel^2+ β_1\it{R}(\bf{x}) \quad \it{Eq(4)} \]
Using estimate xk ,the updated field map in the kth iteration is estimated as:
\[ {\bf{ΔB_0}}^{k}=arg \it{min}_{\bf{ΔB_0}}\parallel\bf{Y}-\bf{E}({\bf{ΔB_0}}){\bf{x}}^{k}\parallel^2+ β_2\it{R}(\bf{ΔB_0}) \quad \it{Eq(5)} \]The above two step iterative process is repeated until the convergence is achieved.
Experiments
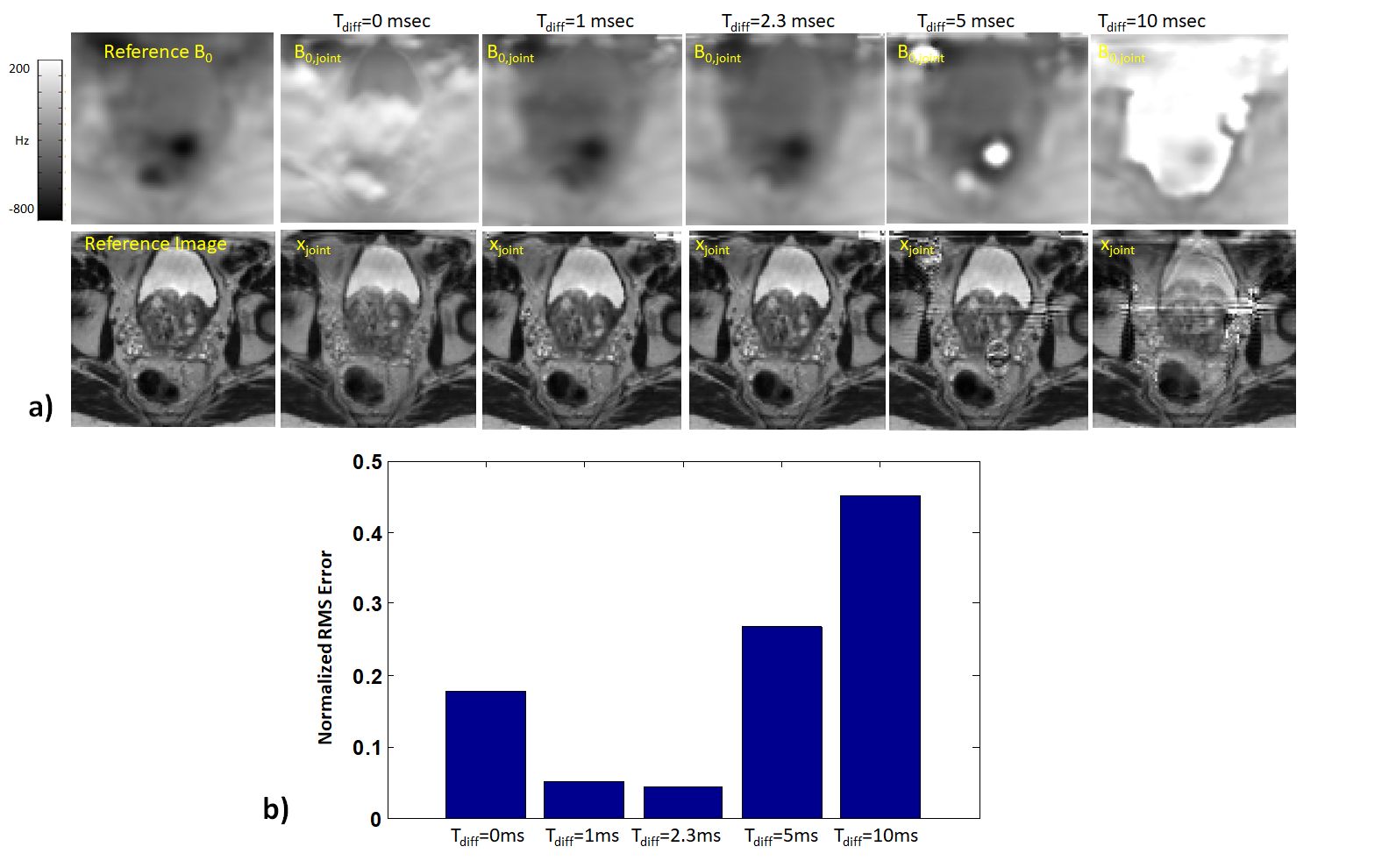
Scanning was performed on a 3T scanner (Achieva,Philips Healthcare). For B0 field,a 3D dual echo gradient echo scan was performed with parameters:resolution= 2mm isotropic,FOV=200x200x70mm3,TE1/TE2/TR=4.6/6.9/8.7msec,scan time=1 min.For reference,T2W images were acquired with parameters:resolution=2x2x4mm3,FOV= 180x180x55mm3,SENSE acceleration factor=2,TE/TR=100/4700 msec,scan time= 40 sec. EPI single shot distortion corrupted data with SENSE factor=2 was simulated from reference T2W data using B0 field and simulated timings corresponding to a diffusion EPI acquisition (echo spacing=0.7 msec,echo train duration=38.2 msec).The initial B0 was estimated from the reconstructed images x1 and x2 using regularized least squares field map estimation method5.The proposed joint image and B0 map reconstruction was compared against uncorrected reconstruction and correction using initial B0 map.The effect of different time shifts (Tdiff=1,2.3,5 and 10msec) on joint reconstruction is also investigated.Results and Discussion
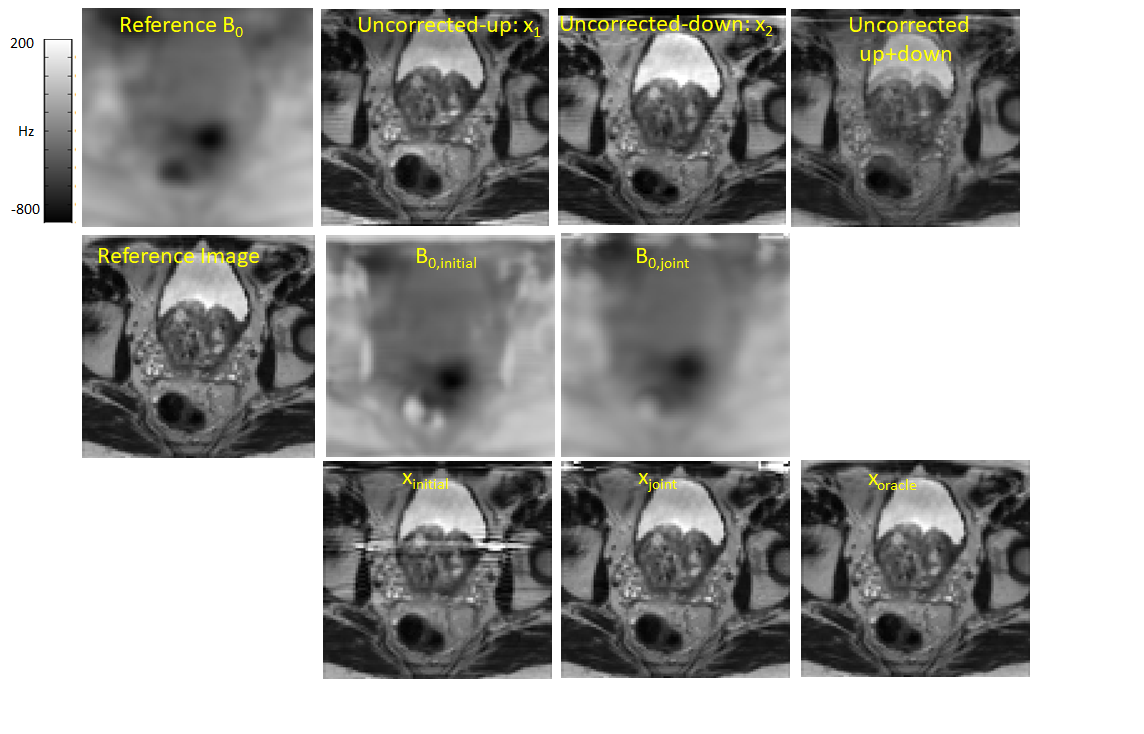
For Tdiff=2.3 msec, reconstructions from different methods are shown in Fig. 2. The initial estimated B0 map was not able to correct for all distortions. Most of the distortions including the pile up artefacts were corrected with proposed method. Fig. 3 shows the effect of different time shifts on the joint reconstructions. Reasonable reconstructions were achieved for Tdiff =1 and 2.3msec. At higher Tdiff>=5msec,additional artefacts were introduced in regions of high B0 inhomogeneity due to phase wrapping. In future, the proposed framework will be investigated for invivo diffusion weighted data.Acknowledgements
This work is supported by Cancer Research UK/EPSRC (grant A21099) and the NIHR Biomedical Research Unit at UCH. We acknowledge research support provided by Philips Healthcare.References
[1] Munger et al, TMI 2000
[2] Usman et al, MRM 2018
[3] Matakos et al, ISBI 2010
[4] Fessler et al, "Michigan Image Reconstruction Toolbox," available at https://web.eecs.umich.edu/~fessler/code/index.html
[5] Funai et al, TMI 2008
Figures