0072
Motion-insensitive 3D T2*-weighted MRI using a motion- and B0 field-navigator1National Institute of Neurological Disorders and Stroke, National Institutes of Health, Bethesda, MD, United States
Synopsis
The ability of T2*-weighted (or susceptibility-weighed) MRI to provide structural and functional information about the brain is affected by B0 field fluctuations associated with head motion, which are inadequately accounted for in current correction approaches. Here, a 3D EPI navigator was developed to measure head motion, map the associated complex B0 field changes and correct their effects in T2*-weighted GRE MRI. Adequate temporal resolution of the navigator was achieved by implementing 2D parallel imaging with controlled aliasing. A fast reconstruction strategy is proposed to retrospectively correct the motion artifacts, overcoming limitations of prospective B0 corrections inadequately dealing with the spatially complex B0 changes.
INTRODUCTION
T2*-weighted (or susceptibility-weighed) MRI provides rich structural and functional information about the brain but is sensitive to B0 field fluctuations(1,2). Previous studies have focused on geometrically simple field changes due to respiration or motion other than that of the head(3–8). Here, a 3D EPI navigator was developed to map the spatially complex B0 field changes induced by head motion. Adequate temporal resolution of the navigator image was achieved by implementing 2D parallel imaging with controlled aliasing. Because real-time shimming is typically limited to zero- and first-order adjustment, a fast retrospective reconstruction strategy is proposed, utilizing the more detailed motion and B0 information from the navigator image.METHODS
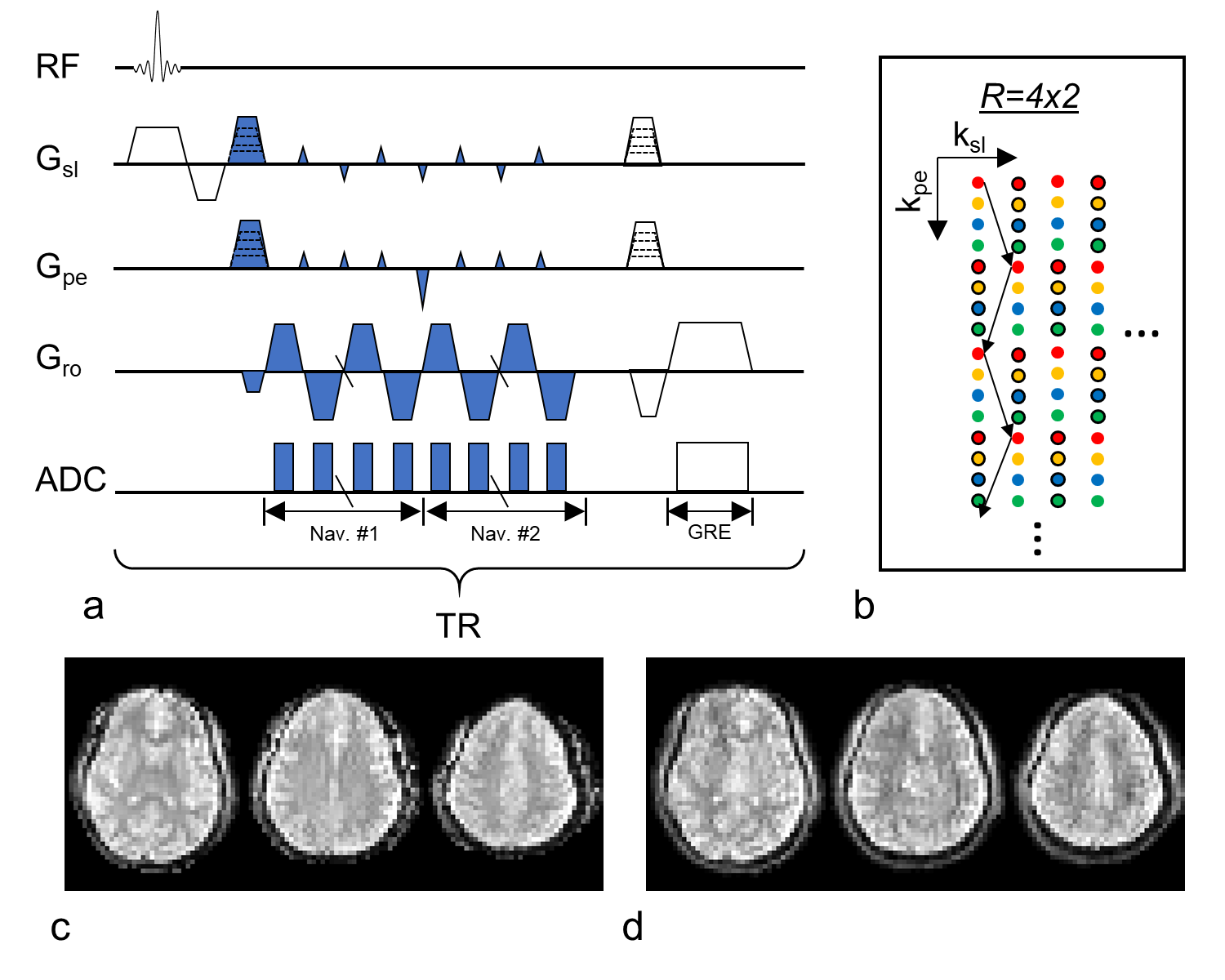
The acquisition scheme of the navigator in a high-resolution 3D GRE sequence is shown in Fig. 1. Within each TR, two consecutive navigators are acquired before the multi-echo GRE imaging data, with blips in both slab- and phase-encoding direction for controlled 2D-aliasing(9). 3D navigator images can be reconstructed at high rate from partially acquired k-space data (indicated by dots of the same kind in Fig. 1b). Full-FOV navigators can also be reconstructed using the complete k-space data, albeit at a lower temporal rate.
Reconstruction of the navigator image involved Nyquist ghost correction, zero-order B0 adjustment and EPI distortion correction. Head motion was estimated based on coregistration of the magnitude of the first navigator. B0 field changes were measured using phase maps of both navigators.
GRE image data were corrected retrospectively using the navigator and a novel, efficient, conjugate gradient-based reconstruction algorithm. In the algorithm, GRE data was separated into m groups based on the motion information so that within each group, relative motion is small and B0 changes can be approximated to be linear in space, while high-order B0 changes are corrected across groups. Data was not necessarily grouped consecutively in time. This linear condition leads to a shift of the k-space coordinate and enables both B0 changes and motion to be corrected for using the fast NUFFT algorithm (10) within groups.
Experiments were conducted on a 7 T MRI scanner (Siemens) with a 32-channel RF head coil (Nova Medical). Three healthy human volunteers were recruited for the study. They were instructed to either stay still or move their heads in a stepwise fashion during a scan. Those static scans were performed at different head poses, and the corresponding GRE images were used to evaluate the navigator’s accuracy for motion and field measurement. The sequence used FOV=240x192x96 mm3 and TR=45 ms. Navigator-specific parameters are TEnav1=6.5 ms, TEnav2=14.7 ms, parallel imaging R=4x2 and resolution of 4 mm. Within a TR, 12 echoes were acquired for each navigator in 6.5 ms. Times to acquire a fast (R=4x2) or full-FOV navigators were 0.54 and 4.32 s (12 or 96 shots), respectively. Resolution of GRE was 2 or 1 mm, with TEGRE-2-mm of 24, 26, 28, 30, 32 ms and TEGRE-1-mm of 24, 26.5, 29 ms, respectively.
RESULTS
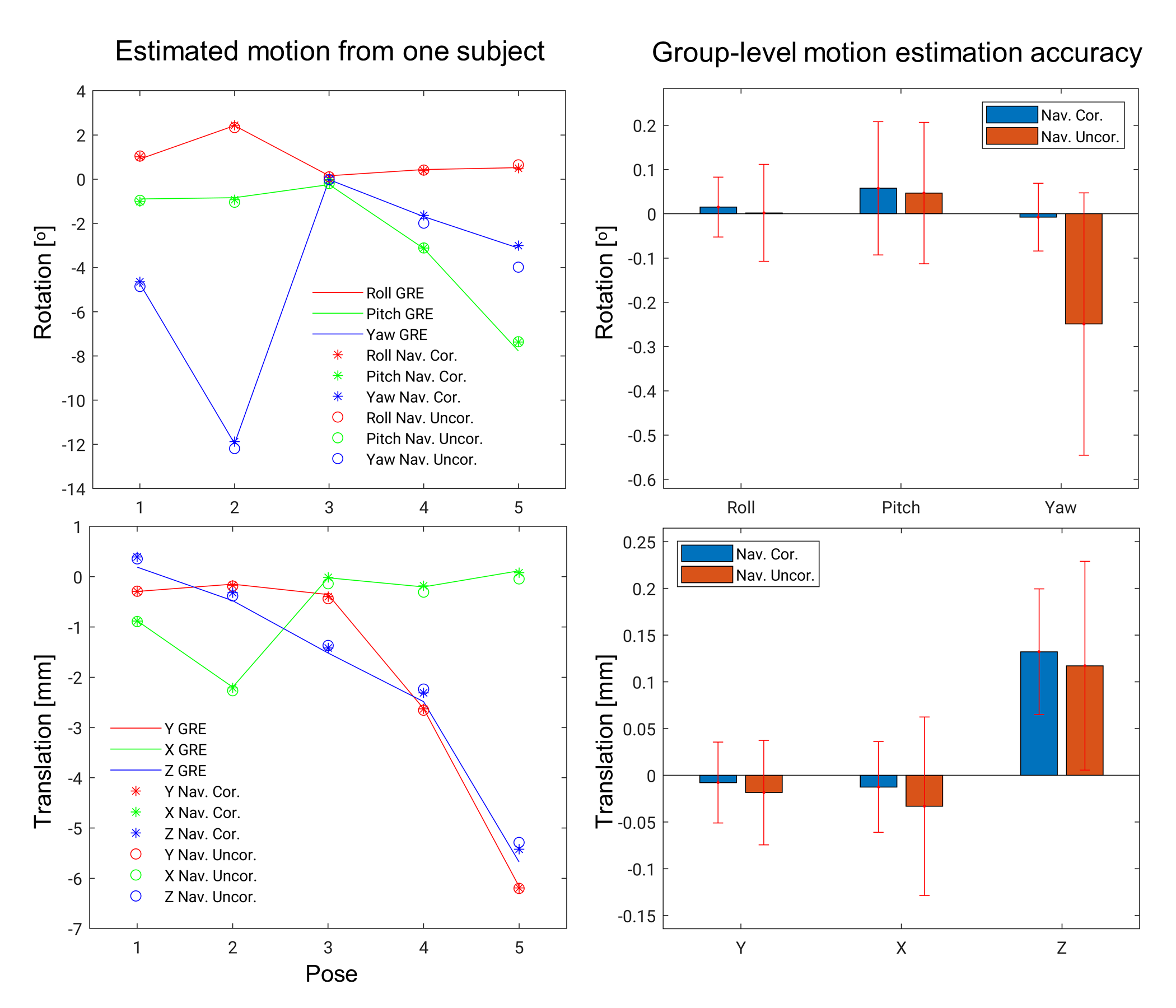
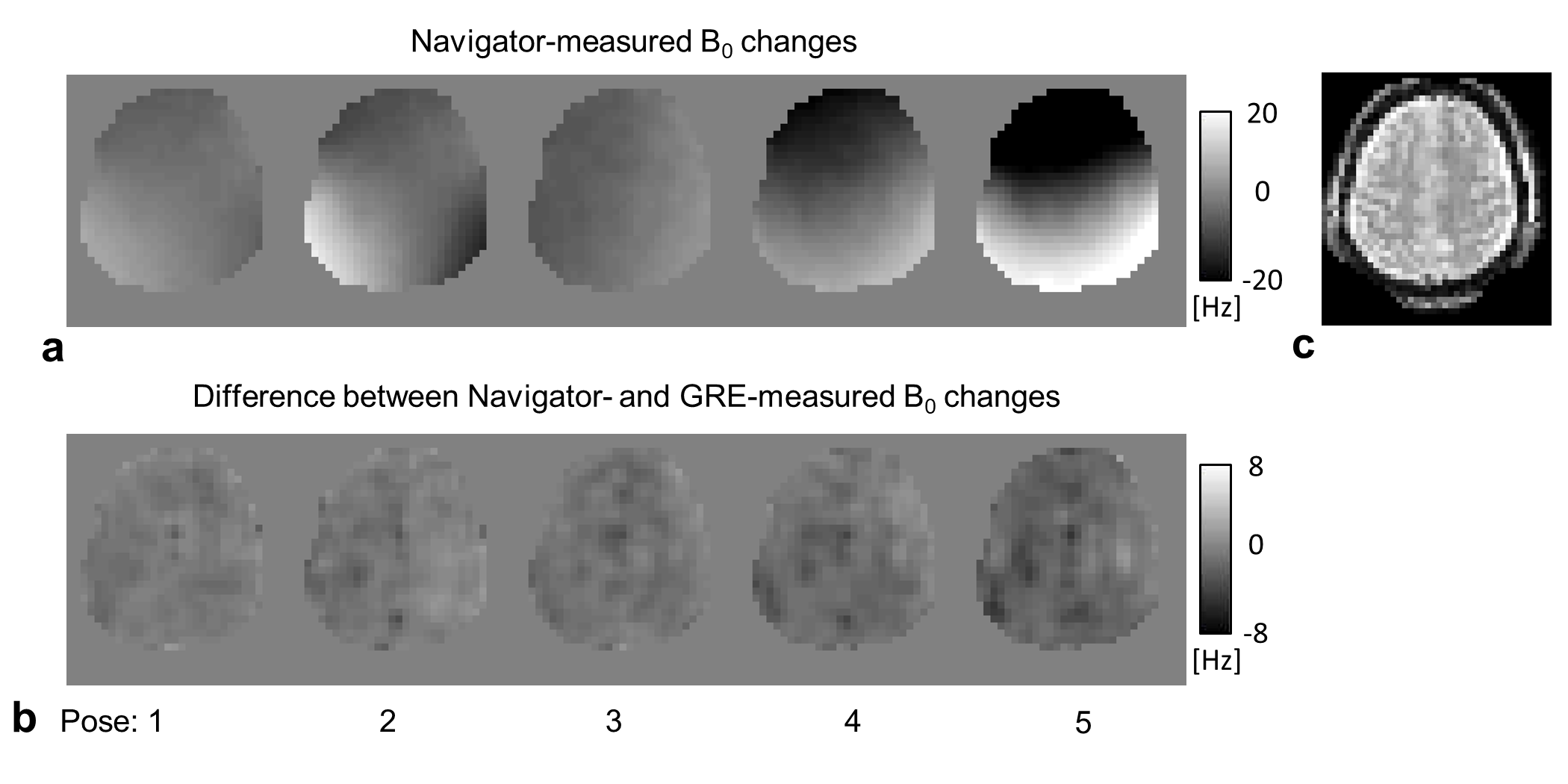
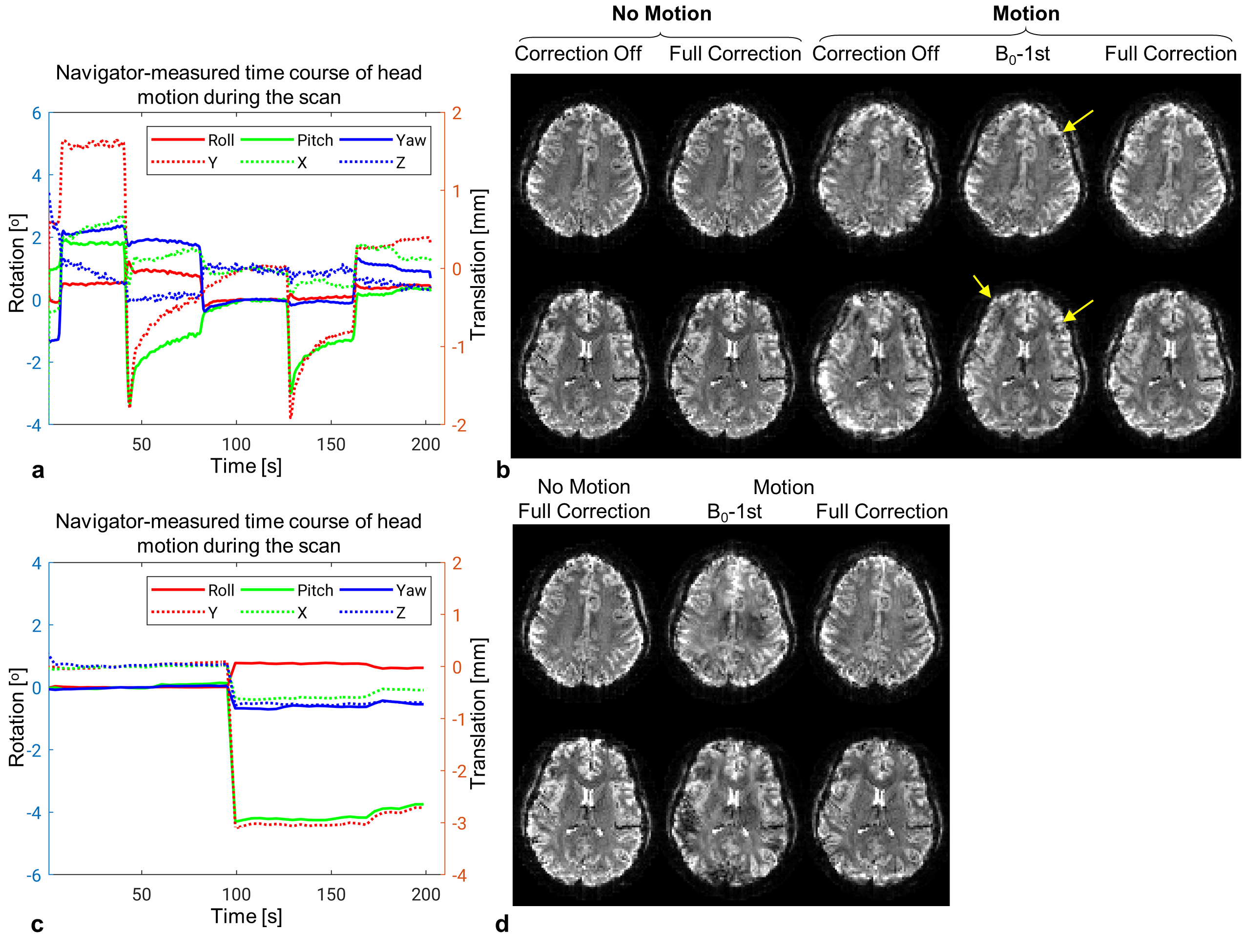
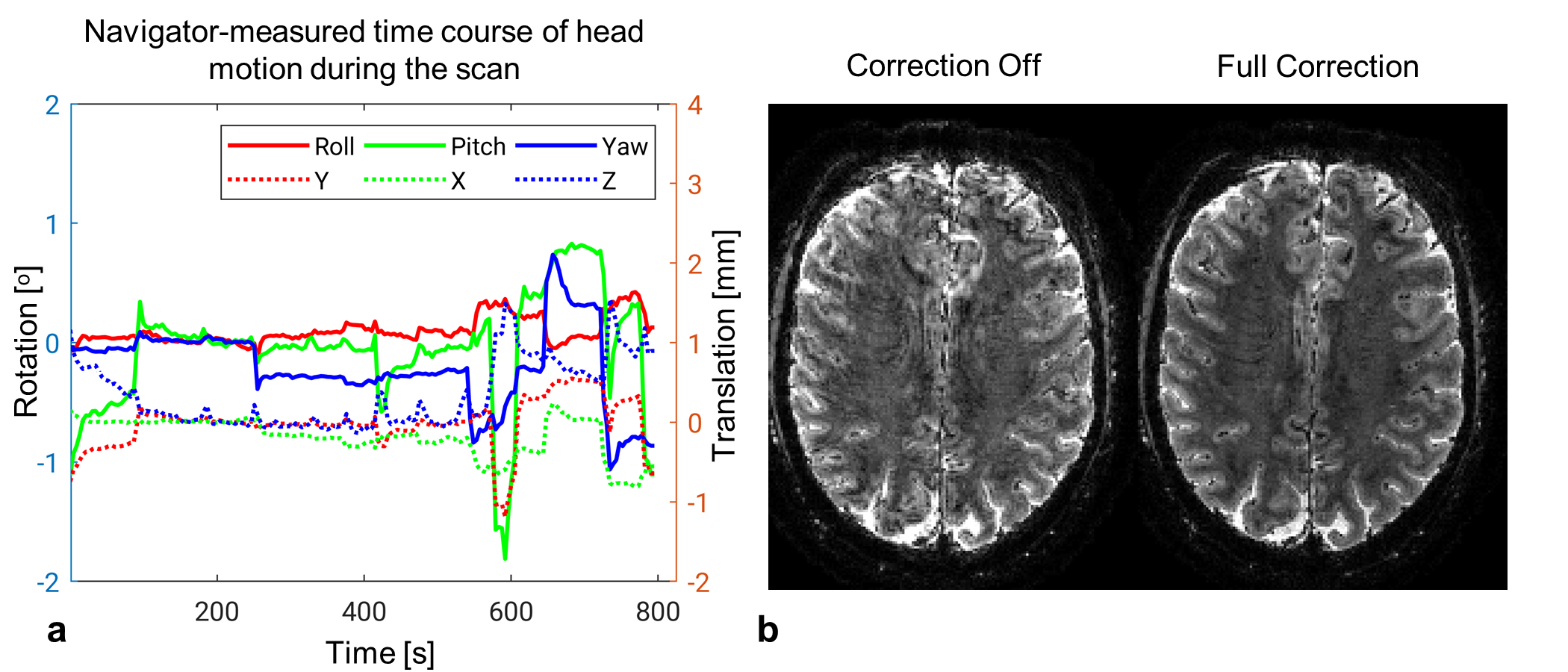
Examples of reconstructed full-FOV and fast navigators are shown in Fig. 1c and d, respectively. In Fig. 2, the accuracy of motion estimation using full-FOV navigators from static scans are shown to be better than 0.25ᵒ and 0.25 mm, respectively. Distortion correction was found to improve accuracy. Particularly, the uncorrected navigator is less accurate in estimating “Yaw” rotation (around the head-foot direction) during simultaneous “Pitch” rotation. Navigator-measured B0 changes are shown in Fig. 3a, and the difference compared to GRE-measured B0 changes in Fig. 3b with a 2.5-percentile of -3.1 Hz and a 97.5-percentile of 3.2 Hz across all the poses and voxels. Reconstructed T2*-weighted GRE images with resolutions of 2 mm and 1 mm and different levels of correction are shown in Fig. 4 and 5, respectively. It is observed that the proposed correction approach effectively reduced artifacts related to head motion, including its associated B0 field changes. Fig. 4 furthermore suggests that linear correction is inadequate to fully account for the spatially complex B0 changes.DISCUSSION and CONCLUSION
Multi-shot
high-resolution T2*-weighted MRI is sensitive to disturbance of B0
field, which in part results from head motion. Here, a 3D EPI navigator was
developed with high temporal and spatial resolution to provide a means to
eliminate associated image artifacts. It was shown that the navigator has
promising accuracy for both motion and field tracking. We also demonstrated the
effectiveness of retrospective correction of the B0 field, which
appears superior to prospective approaches with limited real-time shimming complexity. A
computationally efficient algorithm was proposed to facilitate the B0
correction. Future studies of the navigator will explore optimization of the
navigator’s acquisition in terms of speed and resolution and applications for
different imaging purposes.Acknowledgements
This work was supported by the Intramural Research Program of the National Institute of Neurological Disorders and Stroke.References
1. Duyn JH. Studying brain microstructure with magnetic susceptibility contrast at high-field. NeuroImage 2018;168:152–161
2. Liu J, Zwart JA de, Gelderen P van, Murphy‐Boesch J, Duyn JH. Effect of head motion on MRI B0 field distribution. Magn. Reson. Med. 2018
3. Ward HA, Riederer SJ, Jack CR. Real-time autoshimming for echo planar timecourse imaging. Magn. Reson. Med. 2002;48:771–780
4. van der Kouwe AJW, Benner T, Dale AM. Real-time rigid body motion correction and shimming using cloverleaf navigators. Magn. Reson. Med. 2006;56:1019–1032
5. van Gelderen P, de Zwart J a., Starewicz P, Hinks R s., Duyn J h. Real-time shimming to compensate for respiration-induced B0 fluctuations. Magn. Reson. Med. 2007;57:362–368
6. Hess AT, Tisdall MD, Andronesi OC, Meintjes EM, van der Kouwe AJW. Real-time motion and B0 corrected single voxel spectroscopy using volumetric navigators. Magn. Reson. Med. 2011;66:314–323
7. Alhamud A, Taylor PA, van der Kouwe AJW, Meintjes EM. Real-time measurement and correction of both B0 changes and subject motion in diffusion tensor imaging using a double volumetric navigated (DvNav) sequence. NeuroImage 2016;126:60–71
8. Duerst Y, Wilm BJ, Wyss M, et al. Utility of real-time field control in T2*-Weighted head MRI at 7T. Magn. Reson. Med. 2016;76:430–439
9. Breuer FA, Blaimer M, Mueller MF, et al. Controlled aliasing in volumetric parallel imaging (2D CAIPIRINHA). Magn. Reson. Med. 2006;55:549–556
10. Fessler JA, Sutton BP. Nonuniform fast Fourier transforms using min-max interpolation. IEEE Trans. Signal Process. 2003;51:560–574
Figures