0071
Propeller Echo-Planar Time-resolved Imaging with Dynamic Encoding (PEPTIDE)1A.A. Martinos Center for Biomedical Imaging, Massachusetts General Hospital, Boston, MA, United States, 2Harvard-MIT Health Sciences and Technology, MIT, Cambridge, MA, United States
Synopsis
Echo-Planar Time-resolved Imaging (EPTI) is a recent multi-shot EPI-based approach that allows extremely rapid acquisition of distortion and blurring free multi-contrast imaging and mapping. In this work, a motion robust extension to EPTI, termed PEPTIDE, is presented. Combining Propeller-like rotations into the EPTI sampling strategy, this technique brings significant tolerance to shot-to-shot motion and B0 phase variations, as well as opening up opportunities for further acceleration.
Introduction
Echo-planar time-resolved Imaging (EPTI)1 is a recently developed multi-shot EPI-based technique that can rapidly create a large time-series of multi-contrast T2&T2*-weighted images, free from image distortion and blurring. This can enable production of accurate T2, T2*, proton-density, and QSM maps, all with whole-brain coverage from a single acquisition of <1min[~1s/slice@1x1x3mm].
EPTI creates ‘time-resolved’ datasets, with complete k-t coverage across the EPI readout window at a time-resolution of an echo spacing(~1ms). This allows images to be produced for each time point along the EPI readout, free from associated distortion and blurring caused by B0-inhomogeneity induced phase and T2*decay. EPTI acquires k-t space through a ky-segmented traversal, using a highly-undersampled zig-zag trajectory (Figure1a), where the even and odd diagonal transversals of this trajectory sample complementary neighboring ky-points. Such spatiotemporal CAIPI-sampling facilities accurate reconstruction of highly undersampled ky-t space through B0-inhomogeneity-informed parallel imaging2. With this time-resolved approach, the EPI readout in a dual gradient- and spin-echo EPTI sequence has been used to efficiently acquire large time-series of T2&T2*-weighted images. The ky-segmented acquisition facilitates very rapid acquisitions, however, this also leads to a potential sensitivity to inter-segment shot-to-shot motion and B0 phase variations.
Radial and pseudo-radial trajectories are known for their inherent motion robust properties3,4. Continual resampling of central k-space ensures tolerance to inter-shot motion, as well as enabling further motion- and phase-correction methods. In addition, such trajectories cope well with sub-Nyquist sampling and combine well with many advanced reconstruction techniques.
Proposed here is a motion robust extension to the EPTI technique, referred to as Propeller Echo-Planar Time-resolved Imaging with Dynamic Encoding (PEPTIDE). Combining a Propeller4 style trajectory into the EPTI framework, along with dynamic-updating of the sensitivity-encoding information, this work aims not only to substantially increase the robustness of the technique to motion but also to allow for further acceleration.
Methods
PEPTIDE samples k-t space with a zig-zag segmental pattern, similar to EPTI. However, instead of sampling different segments along ky, PEPTIDE repeatedly acquires central segments but with varying rotations in the ky-kx plane (Figure 1a&b). In this manner, each segment closely resembles a blade in a Propeller-type trajectory, with an additional temporal dimension.
Each blade is first separately reconstructed to create low-resolution time-resolved data at a particular angulation in x-y space. This allows for a propeller-style reconstruction across the blades and time-series. Various motion correction techniques are applied to correct for inter-blade motion/phase and the blades are then combined during a gridding process4. The reconstruction pipeline is shown Figure 1c. For parallel imaging reconstruction, EPTI acquires a short calibration scan of a small fully sampled ky-t region. PEPTIDE can use an identical single calibration scan by applying a rotation to the calibration data prior to calculation of the coil kernels for each blade, similar to an approach for slice-GRAPPA in SMS-PROPELLER5. An additional step is proposed here, whereby for any reconstructed blade where significant motion is detected, the estimated motion is applied to the calibration data and the reconstruction for that blade is repeated.
The PEPTIDE method is demonstrated here in a dual gradient- and spin-echo sequence and compared with the equivalent EPTI sequence. In vivo data were acquired on a Siemens Prisma 3T scanner with 32-channel coil at: Resolution=1.1x1.1x3.0mm, FOV=250x250x105mm, TR/EPTI-segment=150ms. Seven ky-segments was used for the EPTI acquisition, and golden-angle ordering for PEPTIDE to allow examination angular undersampling.
Results
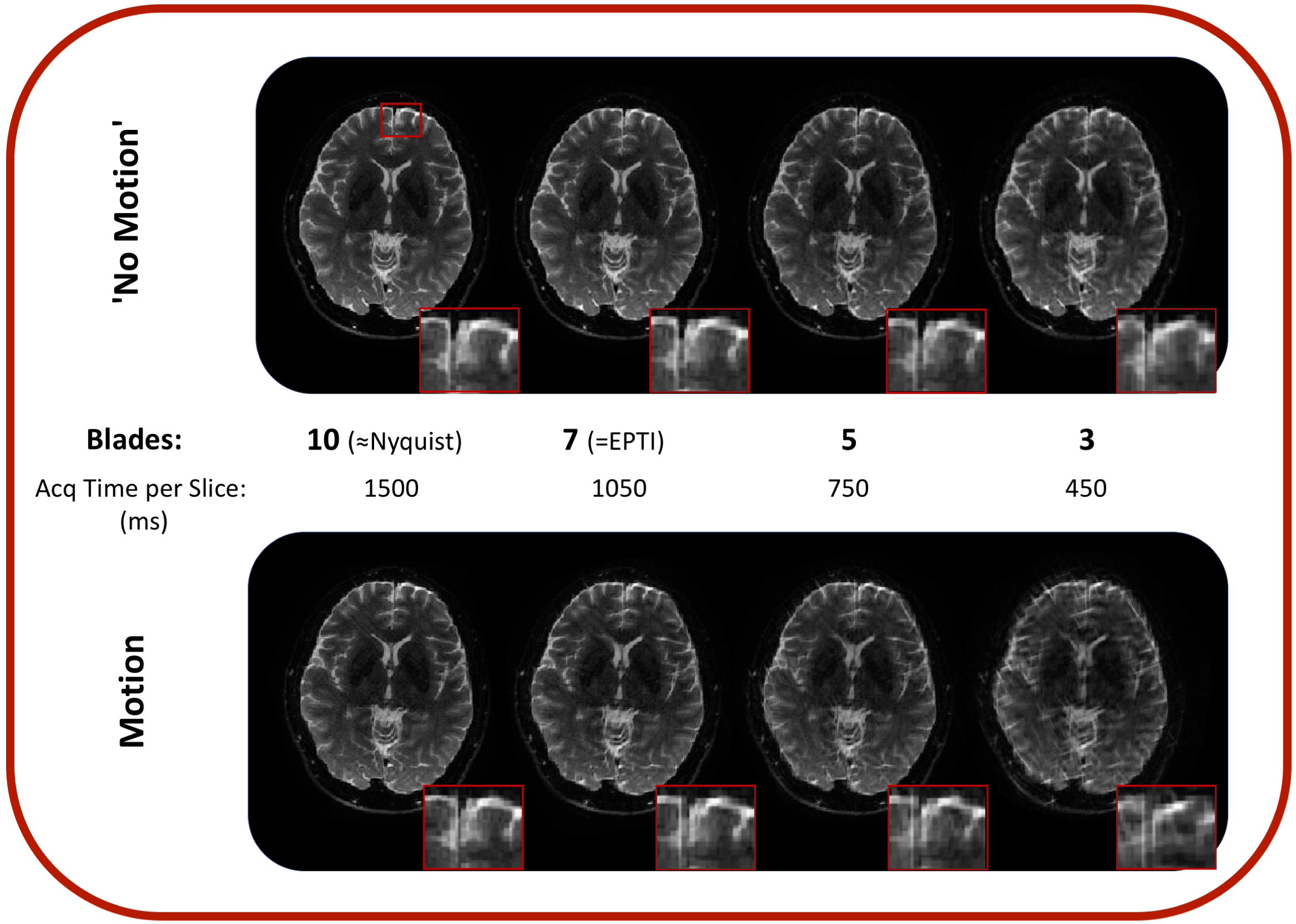
A demonstration of PEPTIDE acquired images, and a selection of mapping applications, is shown in Figure 2 (total Tacq=1.5s/slice). Figure 3 compares EPTI and PEPTIDE methods with identical segment/blade numbers for cases without motion and with large motion in a single segment. There is good agreement between the EPTI and PEPTIDE methods in stationary cases, but far greater tolerance to motion for the PEPTIDE method, as the motion-sensitivity is reduced to 150ms. The effect of varying amounts of motion is further investigated in Figure 4. Figure 5 demonstrates further subsampling with PEPTIDE [5blades R~44, 3blades R~74], without overly significant impact on image quality.Discussion & Conclusion
PEPTIDE is an extension to the powerful EPTI technique, providing a strong tolerance to even extreme motion while simultaneously allowing further acceleration.
Future work will explore the use of low-rank partial-separability reconstruction approaches6 to improve reconstruction and allow even higher accelerations. Such a reconstruction is now being adapted to EPTI with promising results7. Modification of the PEPTIDE trajectory, e.g. through acquiring different sets of blades across the readout (e.g. GEvs.SE) should further increase incoherent aliasing in its time-series data, which should work synergistically with such reconstruction. In addition, while the implemented motion correction was able to significantly improve image quality, more advanced methods have been proposed8 which should enable even further improvements, particularly for lower blade number cases.
Acknowledgements
This work was supported in part by NIH research grants: R01MH116173, R01EB020613, R01EB019437, U01EB025162, P41EB015896, and the shared instrumentation grants: S10RR023401, S10RR019307, S10RR019254, S10RR023043.References
1. Wang F, Dong Z, Reese TG, Manhard MK, Bilgic B, Wald LL, Setsompop K. Echo Planar Time-resolved Imaging (EPTI). In Proceedings of the 26th Annual Meeting of ISMRM 2018. #0217.
2. Dong Z, Wang F, Reese TG, Manhard MK, Bilgic B, Wald LL, Guo H, Setsompop K. Tilted-CAIPI for Highly Accelerated Distortion-Free EPI with Point Spread Function (PSF) encoding. In Proceedings of the 26th Annual Meeting of ISMRM 2018. #0212.
3. Glover GH, Pauly JM. Projection Reconstruction Techniques for Reduction of Motion Effects in MRI. Magn Reson. Med. 1992;28:275-289.
4. Pipe JG. Motion Correction with PROPELLER MRI: Application to Head Motion and Free-Breathing Cardiac Imaging. Magn Reson. Med. 1999;42:963-969.
5. Norbeck O, Avventi E, Engström M, Rydén H, Skare S. Simultaneous Multi-Slice Combined With PROPELLER. Magn. Reson. Med. 2018;80:496-506.
6. Liang ZP. Spatiotemporal imaging with partially separable functions. In Proceedings of the IEEE Int. Symp. Biomed. Imag 2007, pp. 988–991.
7. Dong Z, Wang F, Reese TG, Bilgic B, Wald LL, Setsompop K. Echo Planar Time-Resolved Imaging (EPTI) with Subspace Constraint and optimized k-t trajectory. Submitted to: In Proceedings of the 27th Annual Meeting of ISMRM 2019.
8. Pipe JG, Gibbs WN, Li Z, Karis JP, Schar M, Zwart NR. Revised Motion Estimation Algorithm for PROPELLER MRI. Magn Reson Med. 2014;72:430-437.
Figures