0068
Enhanced reliability of NMR marker localization using real-time field tracking1Institute for Biomedical Engineering, ETH Zurich and University of Zurich, Zurich, Switzerland, 2Institute for Biomedical Engineering, University and ETH Zurich, Zurich, Switzerland
Synopsis
Tracking head mounted NMR markers enables to carry out prospective motion correction for brain MRI. In this work, a NMR marker tracking method that facilitates easy deployment is characterized with respect to tracking reliability in the presence of hardware drift and other imperfections. The method is then applied to a high-resolution in-vivo scan with long scan duration.
Introduction
Prospective motion correction (PMC) is an effective means to correct for rigid-body head motion during brain MRI and impressive results have been obtained with various head tracking modalities$$$^{1-4}$$$. However, the adoption of PMC into routine use still poses challenges, particularly those of tracking robustness, ease of deployment, and workflow efficiency. These demands have translated into a number of innovations.
Optical methods have become more reliable and flexible by addressing issues of lines-of-sight and cross-calibration, specifically by the transition to multiple cameras$$$^5$$$ and by accelerating the cross-calibration procedure$$$^6$$$. Recent improvements in NMR marker tracking removed the need for sequence overhead$$$^7$$$ or other sequence modifications$$$^8$$$. These methods relied on accurate knowledge of gradient dynamics gained through separate and often lengthy calibration procedures prior to in-vivo scanning. Recent work has obviated the calibration step by real-time field tracking during imaging with PMC, using an additional set of stationary NMR markers$$$^9$$$. The original purpose of this approach was to eliminate preparation time and streamline the workflow. In the present work, we explore and assess the same strategy in terms of its complementary impact on tracking reliability, particularly with respect to hardware drift and other imperfections.
Methods
A
stationary (lab-frame,“L”) and a moving (head-frame,“H”) set of markers are
related to each other in real-time via the in-bore field evolution. The phase
accrual of a NMR marker reads $$$\phi(t)=\gamma\int|B(\textbf{r},t)|\cdot dt+\omega_0t$$$ with the
magnetic field $$$B(\textbf{r},t)$$$ and
the marker’s baseline Larmor frequency $$$\omega_0$$$. Taking the time
derivative and expanding $$$B(\textbf{r},t)$$$
using a sum of
factorized spatial and temporal components yields a system of equations for each
marker set:
$$\text{Eq.1:}\hspace{10mm}\dot{\phi}_i^L(t)=\gamma_L\sum_lf_l(\textbf{r})\cdot g_l(t)+\omega_{0,i}$$
$$\text{Eq.2:}\hspace{10mm}\dot{\phi}_j^H(t)=\gamma_H\sum_lf_l(\textbf{r})\cdot g_l(t)+\omega_{0,j}$$.
Given the phase accrual of all markers, the positions of the lab-frame markers (determined by preceding FID frequency measurement under constant gradients) and specifying the basis functions $$$f_l(\textbf{r})$$$, the $$$g_l(t)$$$ can be obtained from Eq.1 and hence the positions of the head-frame markers from Eq.2. A first-order spherical harmonic basis was used.
All experiments were carried out on a 7T Philips Achieva system (Philips Healthcare) and a 32-channel receiver array (Nova Medical). Fig.1 shows the experimental setup.
To characterize the tracking performance under system drift, an EPI sequence was used to heat the gradient coils while tracking four rigidly placed markers using sinusoidal gradients (duration/frequencies= 1ms/[2,3,4]kHz, amplitude=7mT/m). The temperature was monitored by a sensor inside the gradient coil system. The resulting rigid-body parameters were reconstructed using the real-time field tracking and a calibration approach$$$^7$$$, for which a separate calibration measurement was performed.
A T2*-weighted high-resolution sequence was used for further experiments (resolution=0.3x0.3x1.2mm³, TR/TE=750/25ms, duration=19.5min, 2 averages). Tracking was performed by superimposing sinusoidal gradients on the crusher gradients (duration/frequencies=1ms/[2,3,4]kHz, amplitude=7mT/m). To study subtle effects of field changes caused by the gradient stepping on the phase encoding axis, four static NMR markers were tracked with a field tracking and a calibration approach. In-vivo imaging was performed with a healthy volunteer instructed to hold still.
Results
A temperature increase of almost 25deg was obtained and the respective Fourier components drifted up to 0.2% (Figs.2a,b). In the calibration case, the rigid-body time-series display a clear drift in most curves (Fig.2c) amounting to about 0.1mm peak-to-peak, as provided by moving-average fitted curves (red). The real-time field tracking approach reduces the drift by an order of magnitude. Fig.3 illustrates that systematic errors occur when reconstructing the rigid-body parameters using a static calibration, with a deviation of about 0.5mm along the phase encoding axis (y). Reconstruction using real-time field tracking reduces the errors by an order of magnitude.
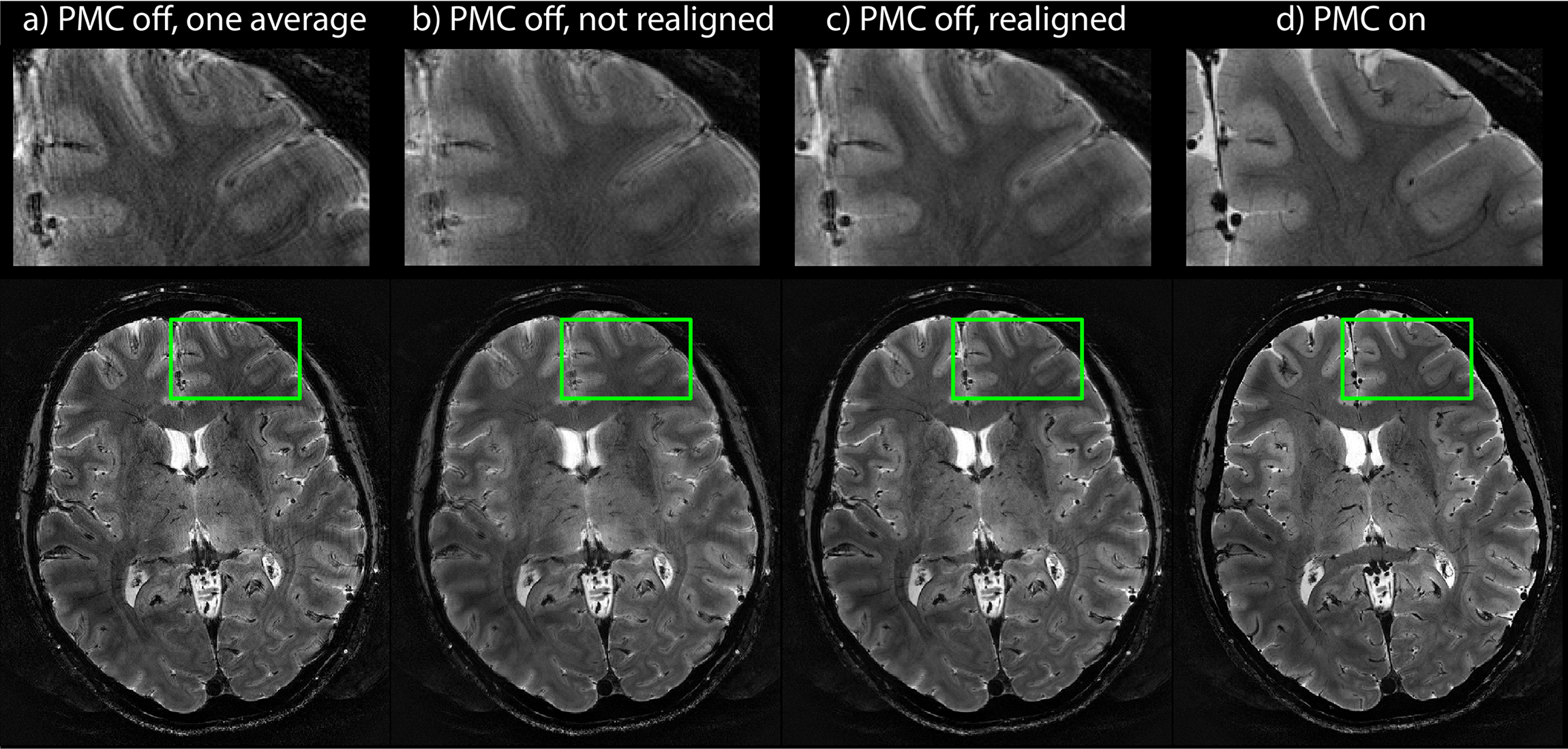
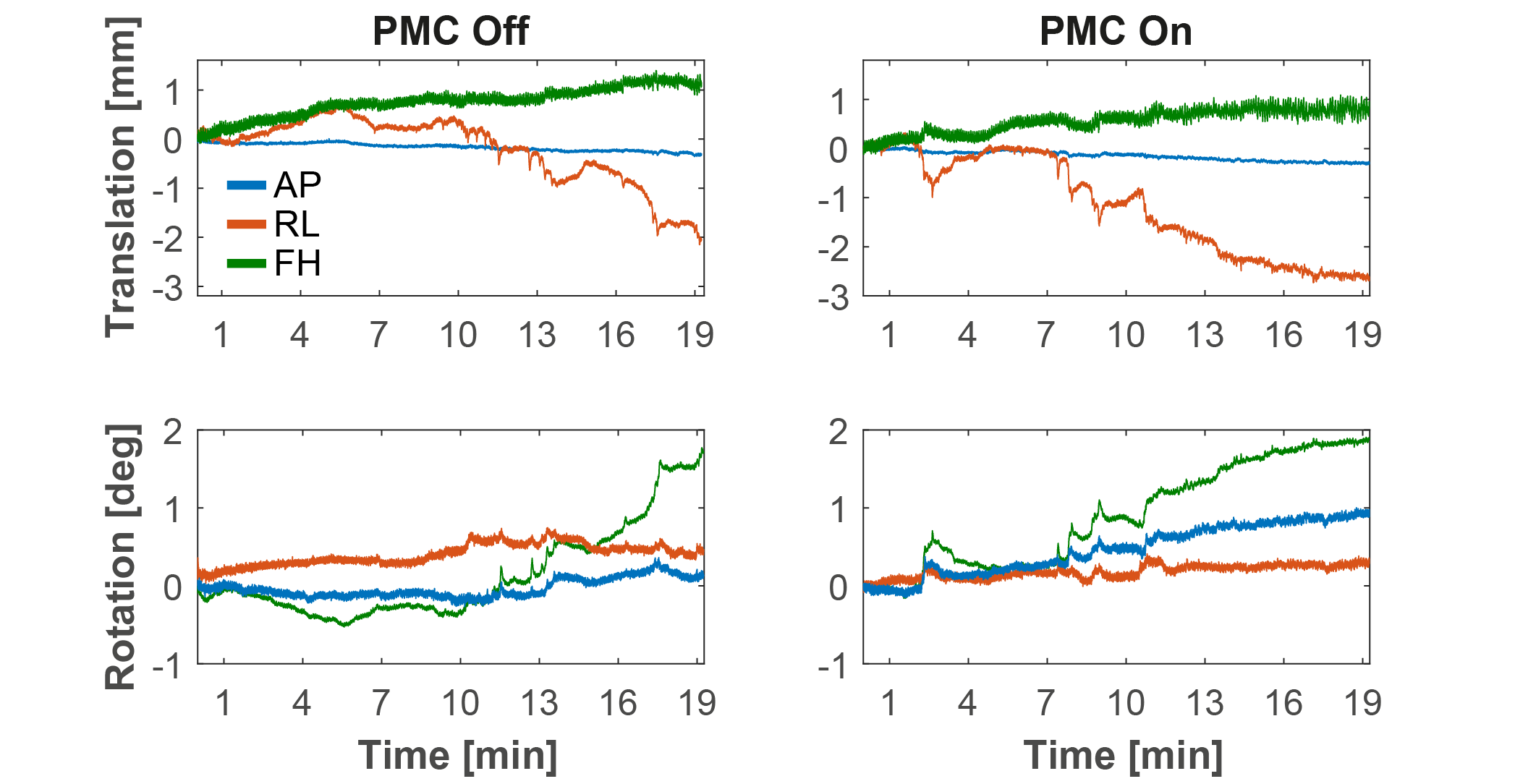
The individual averages and averaged images with and without realignment all resulted in perceivable image artefacts (Figs.4a-c) while the PMC case achieved excellent image quality (Fig. 4d) that is appreciable by the amount of tiny details present in the image, testifying to high tracking precision and accuracy. Fig.5 shows the rigid-body head motion during the scans.
Discussion and Conclusion
Real-time field tracking in the laboratory frame enhances the accuracy of PMC with NMR markers by up to the order of 500$$$\mu$$$m. It eliminates error due to thermal hardware drift and other systematic field changes. The former is likely linked to changes in mechanical resonance behavior of gradient coils during heating. The latter appears to relate to gradient stepping during a scan, causing corresponding variation in mechanical gradient response and residual eddy currents. Eliminating related errors is important since PMC may otherwise fail to improve image quality or render it worse.
Moreover, real-time field tracking hardly affects the tracking precision. This is remarkable in that detection noise of the stationary field probes actually propagates into motion parameters. It appears to be compensated by the fact that real-time field tracking, in turn, eliminates actual field noise missed by preceding calibration.
Acknowledgements
No acknowledgement found.References
1) Zaitsev et al, Neuroimage (2006)
2) Maclaren et al, PLOS one (2012)
3) Ooi et al, MRM (2013)
4) van der Kouwe et al, MRM (2006)
5) Schulz et al, Magn Reson Mater Phy (2012)
6) Maclaren et al, MRM (2017)
7) Haeberlin et al, MRM (2015)
8) Aranovitch et al, MRM (2018)
9) Aranovitch et al, Proc. Intl. Soc. Mag. Reson. Med. 25, #300 (2017)
10) De Zanche et al, MRM (2008)
Figures
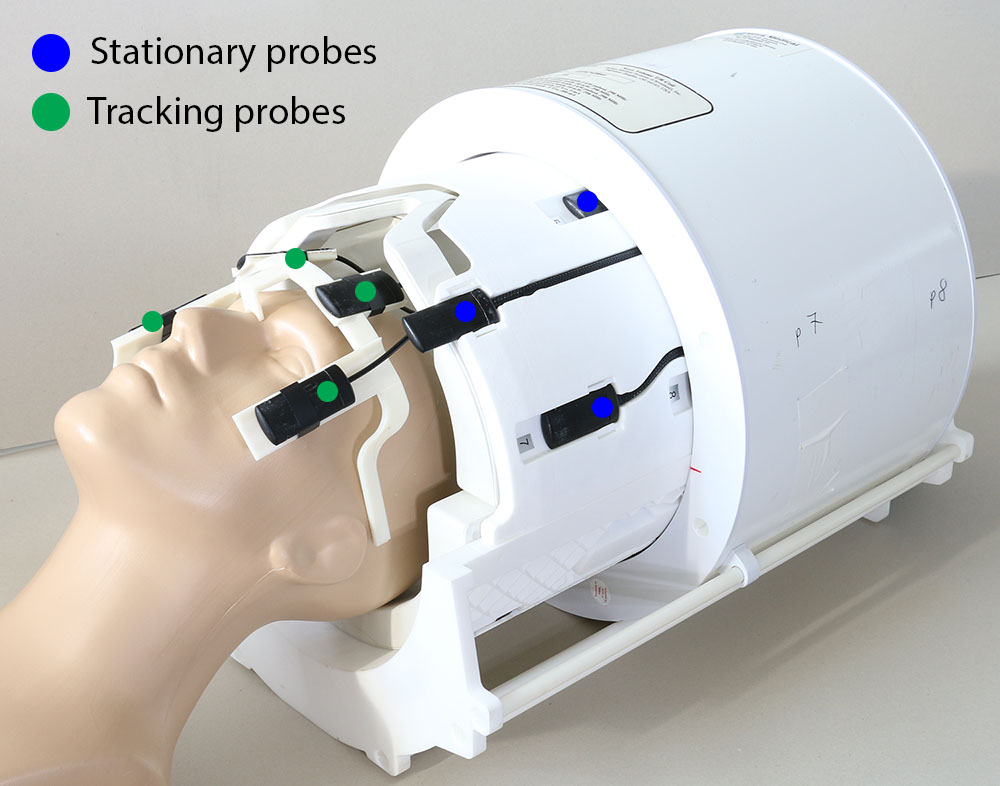
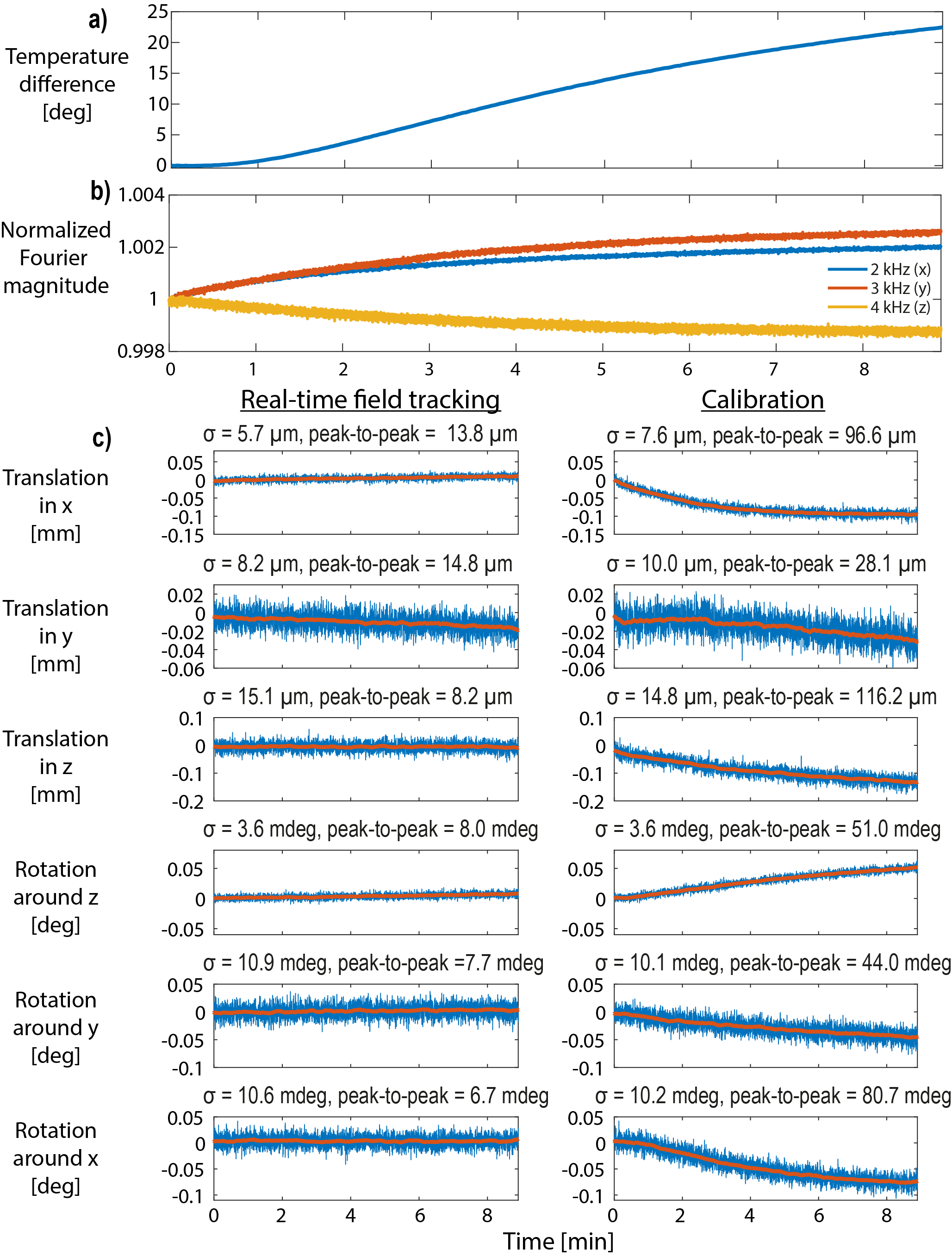
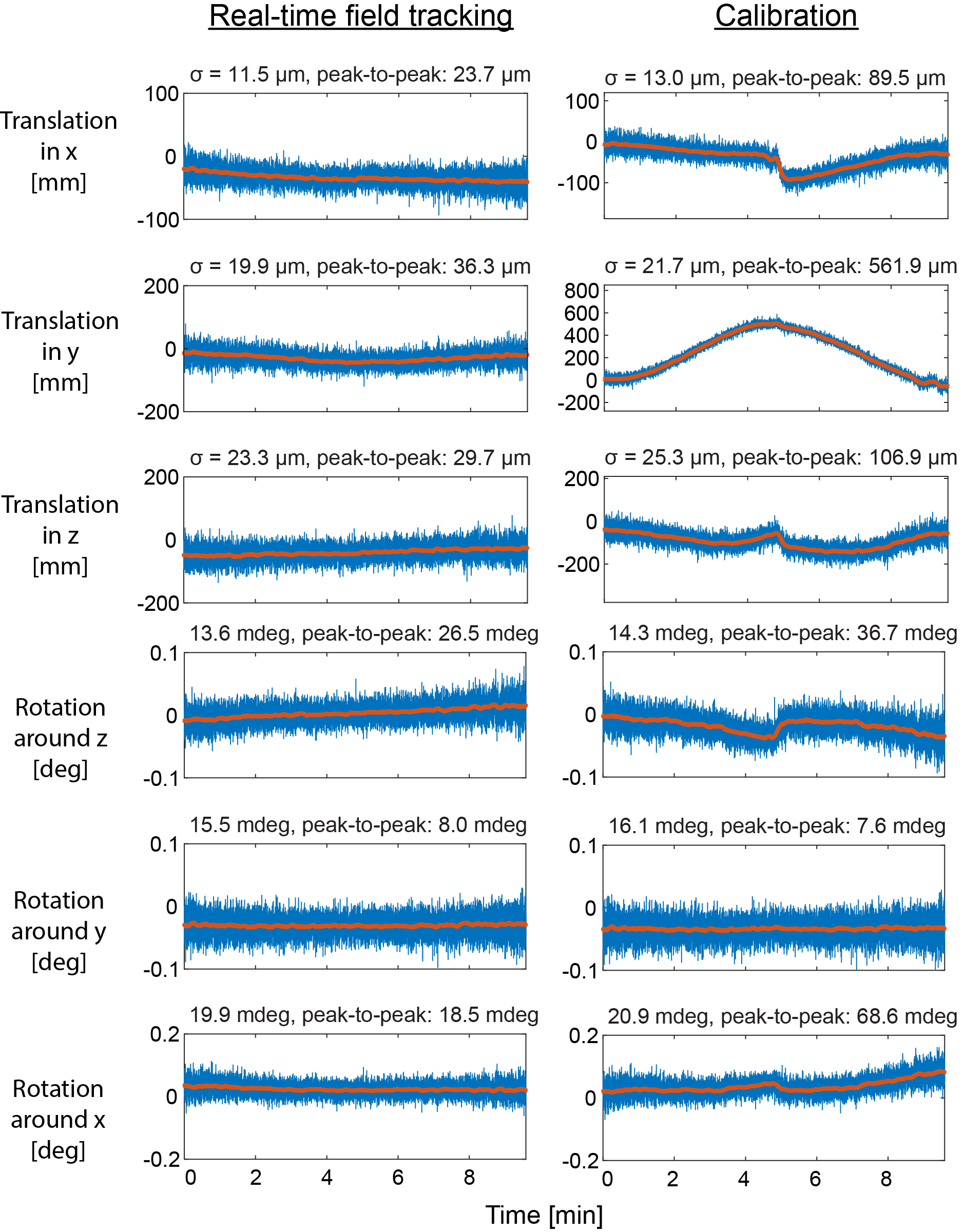
Figure 3: Rigid-body parameter time series, reconstructed with real-time field tracking (left) and a static calibration (right). The red curves were fitted using a moving-average filter and were used to determine the peak-to-peak values and the standard deviation of the fitting residual. Using a static calibration results in significant errors that scale with the stepping of the gradients on the phase encoding axis. Systematic errors are significantly reduced by real-time field tracking.